Por fín ha sido finalizada e inaugurada la primera «figura» de un robot Gundam a tamaño real, como no, está en Japón.
Han tardado 2 meses en realizarlo, pero el resultado vale la pena:
 Video de día:
Video de día:
Más fotos aquí.
Via | Danny Choo

Por fín ha sido finalizada e inaugurada la primera «figura» de un robot Gundam a tamaño real, como no, está en Japón.
Han tardado 2 meses en realizarlo, pero el resultado vale la pena:
Video de día:
Más fotos aquí.
Via | Danny Choo
Ya tengo ensamblado una parte de la cabeza correspondiente a los ojos, cejas, párpado y orejas. Para cada uno de los elementos mencionados, he utilizado un solo actuador en cada uno de ellos, con ello consigo menos consumo y una mecánica y programación más simple.
He aquí algunas fotos donde se puede observar diferentes expresiones faciales.



Proyecto facebot (actualización)
Bueno parece que el proyecto ya va tomando forma,de momento tengo ensamblado parte del rostro.He intentado de utilizar el mínimo de actuadores,en concreto por ahora son nueve,los labios superior e inferior utilizan cuatro,la mandíbula uno y el resto repartidos ente las cejas,ojos,párpados y orejas.
Aquí unas fotos para apreciar el resultado.





Un vídeo

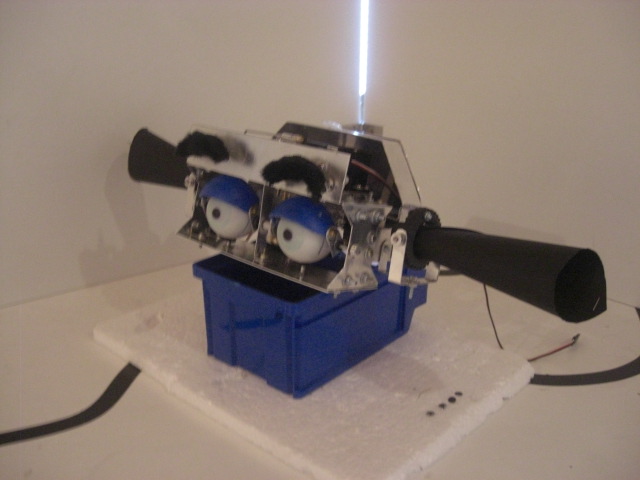
El proyecto facebot nace de la idea de crear un rostro robótico de apariencia humana con el objetivo de poder simular expresiones faciales como enfado,sorpresa, miedo y tristeza entre otros. No es una tarea fácil teniendo en cuenta la complejidad de la parte mecánica y la programación de los movimientos.
Por ahora solo tengo armada la mecánica de los ojos,he aquí algunas fotos de la mecánica.


El material utilizado para la estructura es aluminio de un espesor de 1mm, ligero y muy cómodo de trabajar, los actuadores son servomotores. La parte electrónica aun no la tengo muy clara, pero seguramente me decantare por los módulos BasicStamp 2, también quiero añadirle voz para que tenga mas realismo.
Conforme vaya avanzando lo iré publicando.
Un video
Desde el lanzamiento de la Nintendo Wii con su peculiar control llamado Wiimote han sido muchos los que han decidido usar el Wiimote de Nintendo en sus proyectos de robótica, entre ellos cabe destacar el siguiente robot controlable mediante Wiimote que a su vez puede disparar una pistola de aire comprimido:
Via | Engadget
Está escaneando una ranita de lego, para ello utiliza una aguja que va «palpando» la forma del objeto.

Investigadores de la Universidad de Texas han desarrollado un nuevo material compuesto por cintas entrelazadas de nanotubos que pueden llegar a expandirse hasta un 200% cuando se les aplica una carga eléctrica y volver a su posición original en milisegundos cuando dejan de recibir electricidad.
Este nuevo material es «más resistente que el acero y el diamante» y soporta inalterable unas temperaturas extremas de -196ºC y +1539ºC .
Esto permitiría crear músculos artificiales aún más fuertes y resistentes, lo que permitiría a los robots actuar en los entornos con temperaturas más extremas.
Via | Engadget

Científicos de la Universidad de California han implantado un chip en el sistema nervioso de un Escarabajo Volador Gigante, gracias a este chip pueden controlar el vuelo del escarabajo desde un ordenador, las ordenes son tipo «stop», «start», y girar a la izquierda o derecha.
Pueden ver una demostración aquí.
Via | Hack a Day

La empresa japonesa Takara Tomy ha creado el robot bipedo más pequeño del mundo, capaz de evitar obstaculos y de controlarlo mediante control remoto, saldrá a la venta en Japón a finales del próximo mes de Febrero por unos 40 Euros.
Tiene un tamaño de solo 3,4cm de altura, mueve sus patas mediante un sistema electromagnético e incorpora un altavoz que emite sonidos.
Estará disponible en 4 modelos distintos, desde lo más retro a lo más futurista.
Via | Robotic-Lab English
Dicen que los ojos son el espejo del alma, lo que está claro es que con ellos se pueden mostrar emociones, o así lo piensan la gente de MIT Media Lab, que han creado este curioso robot con 2 pantallas OLED en sus ojos, mirad el video:
Más info aquí.
Via | Robotic-Lab English