
El tutorial que voy a exponer, pretende ser una guía fácil y amena para la construcción de un robot rastreador de luz de bajo coste, los componentes que integran el robot, se pueden adquirir en cualquier establecimiento de electrónica o de aparatos viejos, el robot es de categoría BEAM, al no utilizar microcontroladores, los componentes que forman el circuito son discretos, transistores, resistencias etc.
Tengo que decir que rompe con la filosofía BEAM al utilizar pilas en vez de paneles solares.
Referente a la parte electrónica no hace falta tener muchos conocimientos de electrónica, ya que durante el montaje, explicaré en detalle como polarizar e identificar las patitas de los transistores, que es el componente donde suele haber mas problemas a la hora de insertarlo al circuito.
Bueno, manos a la obra!!!
Lista de componentes:
- 2 motores DC 3v.
- 1 Placa de topos.
- 2 Transistores bc549c.
- 2 Transistores bc557c.
- 2 Resistencias de 10k 1/4w.
- 2 Resistencias ajustables verticales de 47k.
- 2 Foto resistencias LDR.
- 1 Porta pilas de 2 pilas AAA.
Esquema eléctrico (Pulsa para ampliar):

Vamos por pasos, lo primero que tenemos que hacer es cortar la placa de topos con las siguientes medidas , 4 cm de ancho por 9 cm de alto, ver la foto de abajo.

Una vez tenemos la placa cortada, procederemos a insertar los componentes, empezaremos por los transistores, para conectarlos y no tener ninguna sorpresa, hay que tener en cuenta dos cosas, primero identificar si es NPN o PNP, típico en los transistores bipolares, y segundo, identificar la base, emisor y colector.
Polaridad:
Si es NPN Base=Positivo Emisor= Negativo Colector=Positivo

Si es PNP Base=Negativo Emisor=Positivo Colector=Negativo

En las imágenes superiores, muestro los dos transistores que utiliza el circuito, con sus terminales ya identificados. Las ldr hay que tener encuenta en cruzarlas, la derecha tiene que actuar sobre el motor izquierdo, y viceversa. Luego insertamos las resistencia fijas y las variables.
Para interconectar todos los componentes entre si, podéis utilizar trocitos de cable o estaño para hacer las pistas, fijaros bien en el esquema, ayuda mucho, ver foto:
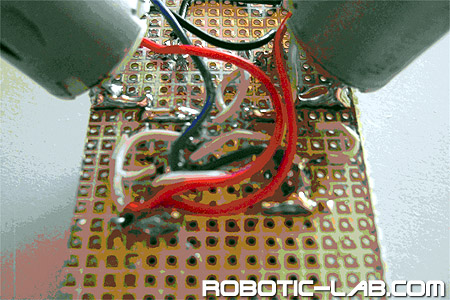
En la foto se puede apreciar los motores ya conectados a la placa, y las soldaduras.
Foto del robot una vez terminado:

Tutorial elaborado por Ismael, circuito diseñado por JVMBots.
Revisa bien la polaridad de los transistores,es posible que esten mal conectados.El bc557 es del tipo pnp el colector (-) la base (-) y el emisor (+).Y el bc549 npn el colector (+) la base (+) y el emisor (-),tambien revisa las resistencias.
Suerte!!!
Gracias por el consejo, lo revise pero al final era porque los motores eran de 3 a seis voltios y le puse en vez de dos un portapilas de cuatro y voilá,ya funciona cuando este haré un video,gracias por el tutorial es muy bueno!!!
Aun asi tiene un fallo, funciona pero cuando hai luz tiene mas potencia va mas rapido, pero cuando no la hai va mas lento,no se para, que puedo hacer.
Lo siento en el comentario de arriba me equivoqué de fallo lo malo es que me va solo un motor, no se si es por el circuito puede que luego cuelgue fotos.
Lo siento micho ya solucione mis fallos, siento haberlos publicado, va genial, gracias.
Funcionara el circuito con 6 vatios, y en los ldr,tengo que ponerle la luz muy directa y potente para que la detecte, dadme ideas, por cierto tenfo la idea de ponerle otro par de ldr en serie, funcionaría?
Era un pregunta funcionaria con 6 v? Si habria modificaciones, cuales serian?
Si va con 6 pero por favor ismael contesta, le puedo poner en paralelo mas ldr
Porque asi si la luz viene deotros sitios la puedo ver, por ejemplo un segundo en la parte izda del robor y uno en la derecha para que si la luz viene de esos lados gire, ademas de si apuntas desde delante.pero se puede hacer en paralelo, o en serie?
Funciona con los 4 ldr pero tiene un fallo, recto va bien y si le doy dese un lado con la luz tambien,pero cuando le doy desde los lados, gira muy rápido y se pasa, ahora os dejo un video, antes y unoo despues.
Por cierto, se podria en vez de dos poner tres ldr ,los normales, y uno central que mueva los dos, porque segun ponga los ldr, o gira muy bien o va bien recto…pero no ambas.si se puede, como se podría hacer?
no puede ser alimentao con una bateria de 9v ?????
En principio esta diseñado para trabajar a 3v.
Un saludo
Che en el esquema no esta marcado el negativo y positivo de la fuente de alimentación como hago ?? :S
Si te fijas en el esquema,hay el símbolo de la batería,la raya más larga es el positivo y la más corta el negativo.
Byte!!
la mas gruesa querras decir ? perdon x ser tan pregunton xD
me podrias enviar el cto más detallados (positivos negativos)
esque soy nuevo en esto y estoy batallando.
un saludo, gracias
[email protected]
No me funciona tu circuito utilice preset de 47K los transistores, todo, lo hice el livewire y lo pase a PCB para hacerlo en placa pero no funciona!!! Que es lo que puede fallar!!!
Hola, no sé porque es necesario usar servos, se puede realizar con motores normales de cc, bueno, motores con reductoras. Hay un enlace cucabot, el robot fototropo que es muy parecido.
oye puedes enviarme un tutorial mas detallado a mi correo que no cache ni una despues de la explicacion de los transitores [email protected]
Buenas tardes, disculpa me podrias decir que resistencia tengo que tener en la resistencia variable? muchas gracias
Son de 47k o 47000 ohmios
La resistencia en serie de la variable es la ldr o fotoresistencia,su valor puede variar.
«title=> ola ismael k tal soy nuevo oye la verad nose nada de esto sera k podias explicarme paso a paso como se hace el sigue luz xfa rpde:>_<
Me sirvio de bastante ayuda, me gusto mucho eso, pero las herramientas son fáciles de encontrar?
Los componentes son económicos y fáciles de encontrar en cualquier tienda del ramo.
Un saludo
Anda barbaro pero la resistencia de 47k tuve que quitarla xq me mataba el voltaje….todavia lo estoy armando
por favor alguien….necesito el analisis teorico del circuito….
ola ismael kisiea saber como puedo conectar las resistencias
ya k yo lo estoy asiendo en un proto
no me sirvio para nada. DONDE ESTA EL PASO POR PASO????
Hola me gusta tu proyecto pero tengo una pregunta si pongo motores de mayor potencia con un porta pilas para seis de AAA el circuito funciona bien ohhhh puede haber un problema en el circuito