Este robot nació de la idea de armar un robot hexápodo sencillo tanto a nivel de inteligencia y mecánico.La electrónica es de bajo nivel,con esto quiero decir que no utiliza ningún tipo de microcontrolador para definir su comportamiento,si no mas bien componentes discretos y algún c.i.La mecánica de las patas es un kit de Parallax (Crawler Kit) que se acopla al Boe-Bot,el cuerpo es de cosecha propia.Para mover las patas utiliza dos servos Futaba trucados.
Vamos a analizar con mas detalle las partes del robot.
Sensores
Los sensores están dispuestos al frente y su misión es detectar los obstáculos,hay dos, uno direccionado a la izquierda y el otro a la derecha.Se basa en el dispositivo SHARP IS471f.El sensor incorpora un modulador/demodulador integrado y a través de su patilla 4 controla un diodo LED de infrarrojos externo,modulando la señal que este emitirá y luego es captado por el IS471F donde hay el receptor.
Patillaje del sensor y esquema eléctrico.
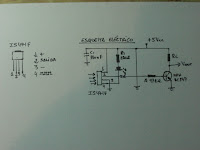
(Pinchar para ampliar)
Patilla 1=Positivo de la fuente 5Vcc
Patilla 2=Salida (1 lógico en reposo y un 0 lógico cuando detecta un objeto)
Patilla 3=Negativo
Patilla 4=En esta patilla se conecta el diodoIR Led con su resistencia limitadora.La distancia de detección depende de esta resistencia,a mayor resistencia menos corriente circula por el diodo y menor sera la distancia de detección.En cambio si añadimos una resistencia pequeña la corriente aumenta y con ello la distancia de detección,yo he probado con una resistencia de 220 óhmicos y funciona sin problema.
Si os fijáis en el esquema ,en la salida (Patilla 2) del sensor ,le he añadido un transistor (NPN) en configuración emisor común.La misión del transistor es invertir la señal procedente de la patilla 2,cuando la base del transistor recibe un 1 lógico, entre el colector y masa el nivel es 0 y viceversa,el transistor trabaja en corte y saturación.
Puente en H
Para gestionar el sentido de giro de los motores,he dispuesto un puente en H con transistores BJT.Recordemos que en un motor DC para cambiar el sentido de giro,solo hay que cambiar la polaridad en sus terminales,la función del puente en H es esta.No voy a entrar en detalle del principio defuncionamiento del circuito para no extenderme demasiado,solo os dejo el esquema eléctrico.
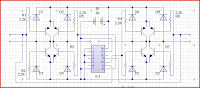
(Pinchar para ampliar)
Multivibrador astable
Si os fijáis en las fotos o en elvideo,encima del los sensores hay un par de LED’S parpadeando,su función es puramente estético y están controlados por un circuito multivibrador astable.
Un multivibrador astable es un circuito que no tiene dos estados estables,sino dos estados quasi -estables entre los que conmuta,permaneciendo en cada uno de ellos un tiempo determinado.Este tiempo depende de la carga y descarga de condensadores,variando su capacidad obtendremos diferentes frecuencias.
Hay varias formar de implementar este circuito,yo he utilizado transistores BJT.
Aquí dejo el esquema.
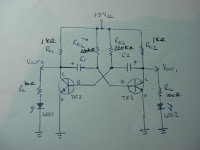
(Pinchar para ampliar)
Los servos se alimentan con cuatro pilas del tipo AA-R6, y los sensores y el astable con otras cuatro pilas del mismo tipo.
Aquí el video del bicho en acción!!