
Este tutorial pretende ser una guía fácil y amena, para la realización de un sencillo robot rastreador de líneas (no microcontrolado).
Personalmente creo que para los que empiezan desde cero, es mejor armar un robot sencillo y que no utilice microcontroladores, si no, circuitos que contengan componentes discretos, y de paso aprenden algo de electrónica básica, lo mismo digo para la parte mecánica. Bueno, vamos al grano!!!
Componentes necesarios para el chasis y mecánica:
- Chapa de Aluminio o Madera de 40x40cm. – 1 Unidad.
- Tacos del 6 largos – 5 Unidades.
- Rueda Loca- 1 Unidad.
- Servos de Rotación Continua (o modificados) – 2 Unidades.
- Ruedas (de unos 5cm de diámetro) – 2 Unidades.
- Tornillos de 3x30mm con arandelas y tuercas – 8 Unidades
- Tornillos de 4x10mm con tuercas – 12 Unidades.
- Tornillos de 4x15mm con tuercas – 4 Unidades.
- Vigas de hierro de 5 agujeros – 6 Unidades.
- Tira de Velcro Adhesivo – 1 Unidad.
Componentes necesarios para la electrónica:
- Protoboard – 1 Unidad.
- Resistencias Necesarias:
2 Resistencias R1,R4 680 Ohm.
2 Resistencias R2,R5 10k Ohm.
2 Resistencias R3R6 2k2 Ohm. - Transistores Necesarios:
2 Transistores Q1,Q4 BD140.
2 Transistores Q2,Q5 BC557.
2 Transistores Q3,Q6 BC547. - Otros Componentes:
J1 Regleta 2 Terminales – 1 Unidad.
J2,J3 Regleta 2 Terminales – 2 Unidades.
OPT1,OPT2 CNY70 – 2 Unidades. - Portapilas de 4 pilas AA – 1 Unidad.
Herramientas necesarias:
- Taladrador.
- Sierra de Calar.
- Cutter.
- Pistola de pegamento térmico.
- Brocas nº6 y nº3
Paso 1 (El Chasis):
Empezaremos por la estructura, yo he utilizado aluminio, pero si queréis, también podéis utilizar madera, he realizado una plantilla con el diseño que yo he usado, podéis crear el vuestro o usar este.
Vista de la estructura, ya cortada y con los agujeros realizados:

Para cortar el aluminio yo utilizo una sierra de calar con una hoja para cortar Hierro.
Paso 2 (La Electrónica):
Bueno, una vez tenemos la estructura hecha, el siguiente paso será cortar la protoboard con las siguientes medidas 6,5 cm ancho por 4,5 cm para ello podemos usar un cutter, así debe quedar:

Para hacer los agujeros en la placa de topos, que nos servirán para sujetar la placa en la estructura, utilizaremos el taladro con una broca del nº3, una vez tenemos los agujeros hechos en la placa, tenemos que hacer otros en la estructura que coincidan con los de la placa.
A continuación, procederemos a insertar los componentes, fijaros bien en el siguiente esquema, ayuda mucho:

Hay que hacer dos circuitos iguales, montados en la placa de topos, cada uno actúa en un motor, cuidado con la polarización de los transistores, las resistencias no necesitan polarización, soldad las regletas, para soldar los componentes, podéis utilizar trocitos de cable o estaño, ojo, con mucha paciencia para no cruzar ninguna pista.
El CNY70 tiene cuatro pines de conexión. Dos de ellos se corresponden con el ánado y cátodo del emisor, y las otras dos se corresponde con el colector y el emisor del receptor. Es importante fijarse bien en el lateral donde aparece el nombre del sensor, para identificar correctamente cada uno de los pines, a continuación podéis ver un pequeño esquema:

Conectamos los CNY70 en la placa de topos, todo tiene que quedar como se ve en las siguientes imágenes:
Parte inferior:
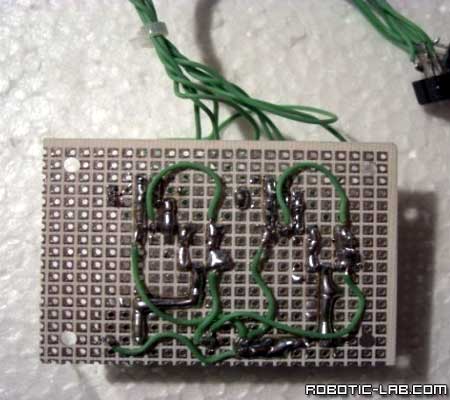
Parte superior:

Montaje:
Ahora sujetaremos la placa sobre la estructura, para separar la placa de la estructura, fabricaremos unos separadores con los tacos del nº6, tenemos que hacer cuatro de una longitud de 2 cm, y 4 tornillos de 3x30mm con sus arandelas y tuercas, para sujetarlo todo, ver fotos a continuación:


Bueno, llegado a este punto, procederemos a montar los servos y la rueda loca, lo primero que tenemos que hacer es trucar los servos, dentro del servo hay un motor de DC, la caja reductora y la electrónica de control, solo tenemos que eliminar la electrónica de control y dejar el motor y la reductora, en este tutorial no voy a explicar cómo hacerlo, para no complicar el tema, en internet existen sitios donde explican cómo hacerlo. Una vez tengamos los servos trucados, procederemos amontar las ruedas en los ejes del los servos y poner las escuadras.
Para hacer las escuadras, necesitamos cuatro vigas de hierro de cinco agujeros, son piezas que se pueden encontrar en kits de meccano, para hacer el ángulo, nos ayudamos con unos alicates, ver fotos:


Hay que hacer cuatro iguales.
Para montar las ruedas, utilizaremos cuatro tornillo de 3×30 mm con sus tuercas, y los discos de plástico que van con los servos, ver fotos.
En las fotos se puede apreciar como he montado la rueda en el eje del motor.


En esta foto se puede apreciar los dos motores con las escuadras y las ruedas montadas.

En la siguiente foto los motores ya están sujetos a la estructura:

Para hacer los agujeros hay que utilizar una broca del nº6, y para sujetarlo todo con tornillos de 4x5mm.
Para el montaje de la rueda loca necesitamos cuatros tornillos 4x15mm con sus hembras, la rueda loca y cuatro separadores, en la foto de abajo, se puede apreciar la rueda montada en la estructura, la longitud de los separadores es de más o menos 1 cm, para hacer los agujeros utilizaremos una broca de nº6.

Bueno, ahora nos faltará fijar los sensores CNY70 en el frontal del robot, los sensores tiene que estar a pocos milímetros del suelo, yo he utilizado dos vigas de hierro juntas, ver foto, todo lo he pegado con silicona, pero cada uno puede hacerlo a su manera.

Ahora nos falta pegar el portapilas en la estructura, nos ayudaremos con tiras de belcro, ver foto.

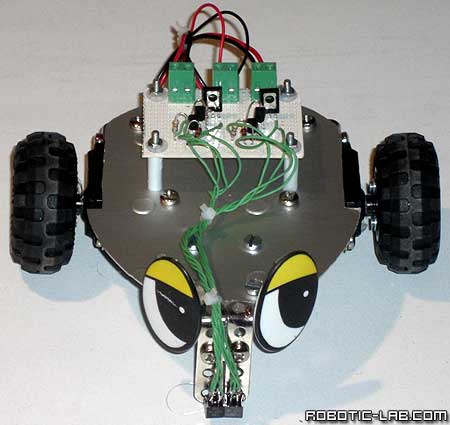
Ya solo nos falta hacer la conexión de alimentación, y conectar los motores en el circuito, fijaros bien en la foto, la regleta del medio es la alimentación, ojo con la polaridad, los motores hay que cruzarlos, en la regleta izquierda hay que conectar el motor derecho y viceversa, fijaros en la polarización de los motores.

Bueno, si habéis seguido todos los pasos, el aspecto final del robot es el que se ve en la foto de abajo, los ojos son opcionales.
Ahora solo falta probarlo!!!
He intentado en hacer un tutorial fácil y ameno, espero que la gente se anime en realizarlo, porque la única forma de aprender es haciendo las cosas y cometiendo errores…
Saludos!
Ismael Serra Garrote
Circuito impreso por X-Robotics.
No hace falta ninguna programación,ya que los servos están trucados,me explico,un servo tiene el motor dc la reductora y la electrónica de control,el trucaje consiste en quitar la electrónica y solo dejar el motor con su reductora.
Un saludo y suerte en el montaje.
usaremos motores dc se puede llevar acabo una programacion con un pic o asi nadamas??
disculpa la velocidad de este seguidor de linea es buena como para ponerlo en un concurso? o solo es con fines educativos
Esta pensado para fines didácticos.
Un saludo
por favor Estas COnectado nesecito de tu ayuda nesecito k me respondas rapido por favor
lo que pasa es que el servomotor no para yo lo arme pero el no para todo lo ve como negro y mañana tengo la feria de la ciencia y se me daño resondeme lo antes posible por favor
gracias amigo a probarlo y a jugar un rato y tratar con alguno nuevoa partir de tu info…
mil gracias y sigue adelante…
😀 🙂
Hola Ismael tengo un problema, he armado toda la circuitería pero el funcionamiento no es el correcto. Los motores estan funcionando al iniciar la alimentacion, y cuando tapo el sensor los motores dejan de fuincionar. Hay algún problema clásico (o común) por el que podría ocurrir mi caso, porfavor házmelo saber si es asi, gracias de antemano.
Hola.
E hecho el circuto pmero lo que pasa es que los meotores no paran.Ya me e fijado en la coneccion de los sensores y esta bien al igual que la de los transistores.
Saludos.Necesito ayuda urgente
Prueba a graduar el potenciómetro
Hola Edward y Amp.
Para poderos ayudaros enviarme por e-mail unas fotos del circuito montado en la protoboard.
e-mail:[email protected]
Saludos
Samuel stoy haciendo un seguidor de linea a la hora de
Soldar los sensores se puedEn danar por el calor del cautin?
Es que cuando tomo voltaje de la senal sobre linea blanca
Me da 1.7 v y Sobre linea negra 0.4 v y se recalienta el regulador de voltaje 7805 , te agradezco me puedas colaborar. Gracias
disculpa si me podrias decir de cuanto es el presupuesto de cada material si no es mucha molestia gracias 🙂
Los componentes electrónicos +,- entre 2 y 3 euros como máximo.Los servos unos 10€ cada uno,pero si quieres se pueden montar unos motores dc con su reductora que cuestan entre 3 y 5€,el resto de piezas puede variar.En total unos 25 o 30€ tirando largo.
Un saludo
Hola. No consigo hacer funcionar el circuito correctamente. He revisado todo exhaustivamente. De momento solo me funciona si recibe luz el fototransistor i deberia ser a la inversa (linea negra). Simulando el circuito con el cocodrile si funciona correctamen si R2 son aprox 90 ohmios i R3 1K. EL problema son las resistencias? Me fio del simulador?
Hola,
La resistencia R2 es de 10k y la R3 de 2k2, todas de 1/4 de watio.Veo que los valores que tu me dices se alejan mucho.Es posible que el fallo este aquí, pero no te lo aseguro.
Has montado el circuito en la protoboard??? si no es asi, lo mejor es pasar del simulador y montar el circuito real haciendo pruebas.
Un saludo, ya me dirás.
Hola de nuevo. He solucionado el robot y ya funciona correctamente. Te cuento un poco lo que he hecho por si sirve para alguien.
El problema mayor es que habia creada mi propia placa con el programa PCB_Wizard y habia soldado los componentes.Revisé todo y todo estaba bien. Monte el circuito en una protoboard con nuevos componentes y funcionaba a la primera!!! En un principio pensaba que el problema estaba en los transistores BC557 porque segun las marcas pueden tener el ese colector y el emisor en terminales diferentes pero no era el problema. Desolde los componentes y me di cuenta con el polimetro que los transistores BC547 estaban estropeados pues no tenian ganancia. LOs cambié y funcionó correctamente. Ajustando el CNY70 forcé un poco el componente y no se porqué (cortocircuito) se volvió a estropear uno de BC547. Lo cambié y funciona ya correctamente.
Muchas gracias por todo y enhorabuena por el blog.
Ok, me alegro que te haya funcionado!!!!
Un saludo
tengo una duda en el esquema del circuito dice que el transistor Q3 es BD140 pero en el listado del material dice que el Q3 es BC547 ?? entonces el transistor Q3 es BC547 o BD140??
Tienes que guiarte por el esquema, Q1=bc547, Q2=bc557, Q3=bd140.
Un saludo
Muchas gracias :D!! ^^
Hola Ismael:
He desarrollado el robot y funciona si le pongo un papel blanco al cny70 se detienen los motores.
Pero no sigue la linea negra se sale de ella y se detiene el motor.
Estoy utilizando dos motores de 12 voltios con capacidad para dos kilos, pero sin reductores estan directos pues necesito velocidad
ayudame que es para un trabajo de la universidad
gracias
hola tengo un problema con la conexion de los cble alguine me podria dar una imagen ams clara o una explicacion es que con el diagradma me confundo gracias 😀
hola una pregunta donde conseguiste las ruedas de tu robot
o llantas
Ismael,al terminar de armar los dos circuitos,tengo que unir los polos de ambas placas paralelamente (osea +con+ y –con– ,estoy en lo correpto o no,espero tu respuesta.
Si es correcto, son dos circuitos identicos y hay que alimentarlos con la misma fuente.
Un saludo
es bien bonito
wou es muy buena esta pagina la recomiendo lo boy a armar
Hola ismael !
Primero que nada muchas gracias por tu tutorial me dejaron hacer un proyecto como este y no tenia bien idea de como realizarlo y me has ayudado mucho. Ya lo he montado en la proto pero no se que sucede, el motor si gira pero el opto no es capaz de detectar negro y con la camara de mi cel no veo que este encendido el led. Pudieras ayudarme ? Ya cheque una y otra vez y no veo cual es el problema.
Gracias
esta muy padre tu tutorial pero me podrias decir o mandar un diagrama de como se hace la placa de las lineas que tiene que seguir un robot o de que material esta hecho.
gracias
hola , en donde consigo estos materiales
Hola me podria decir como unir todo en la placa porque lo eh intentado miles de veces y nada
Hola desde el año 2017
Hola
Y que psa si lo hago con motoreductores? Se tiene que programar verdad??
Interesante.