
Este tutorial pretende ser una guía fácil y amena, para la realización de un sencillo robot rastreador de líneas (no microcontrolado).
Personalmente creo que para los que empiezan desde cero, es mejor armar un robot sencillo y que no utilice microcontroladores, si no, circuitos que contengan componentes discretos, y de paso aprenden algo de electrónica básica, lo mismo digo para la parte mecánica. Bueno, vamos al grano!!!
Componentes necesarios para el chasis y mecánica:
- Chapa de Aluminio o Madera de 40x40cm. – 1 Unidad.
- Tacos del 6 largos – 5 Unidades.
- Rueda Loca- 1 Unidad.
- Servos de Rotación Continua (o modificados) – 2 Unidades.
- Ruedas (de unos 5cm de diámetro) – 2 Unidades.
- Tornillos de 3x30mm con arandelas y tuercas – 8 Unidades
- Tornillos de 4x10mm con tuercas – 12 Unidades.
- Tornillos de 4x15mm con tuercas – 4 Unidades.
- Vigas de hierro de 5 agujeros – 6 Unidades.
- Tira de Velcro Adhesivo – 1 Unidad.
Componentes necesarios para la electrónica:
- Protoboard – 1 Unidad.
- Resistencias Necesarias:
2 Resistencias R1,R4 680 Ohm.
2 Resistencias R2,R5 10k Ohm.
2 Resistencias R3R6 2k2 Ohm. - Transistores Necesarios:
2 Transistores Q1,Q4 BD140.
2 Transistores Q2,Q5 BC557.
2 Transistores Q3,Q6 BC547. - Otros Componentes:
J1 Regleta 2 Terminales – 1 Unidad.
J2,J3 Regleta 2 Terminales – 2 Unidades.
OPT1,OPT2 CNY70 – 2 Unidades. - Portapilas de 4 pilas AA – 1 Unidad.
Herramientas necesarias:
- Taladrador.
- Sierra de Calar.
- Cutter.
- Pistola de pegamento térmico.
- Brocas nº6 y nº3
Paso 1 (El Chasis):
Empezaremos por la estructura, yo he utilizado aluminio, pero si queréis, también podéis utilizar madera, he realizado una plantilla con el diseño que yo he usado, podéis crear el vuestro o usar este.
Vista de la estructura, ya cortada y con los agujeros realizados:

Para cortar el aluminio yo utilizo una sierra de calar con una hoja para cortar Hierro.
Paso 2 (La Electrónica):
Bueno, una vez tenemos la estructura hecha, el siguiente paso será cortar la protoboard con las siguientes medidas 6,5 cm ancho por 4,5 cm para ello podemos usar un cutter, así debe quedar:

Para hacer los agujeros en la placa de topos, que nos servirán para sujetar la placa en la estructura, utilizaremos el taladro con una broca del nº3, una vez tenemos los agujeros hechos en la placa, tenemos que hacer otros en la estructura que coincidan con los de la placa.
A continuación, procederemos a insertar los componentes, fijaros bien en el siguiente esquema, ayuda mucho:

Hay que hacer dos circuitos iguales, montados en la placa de topos, cada uno actúa en un motor, cuidado con la polarización de los transistores, las resistencias no necesitan polarización, soldad las regletas, para soldar los componentes, podéis utilizar trocitos de cable o estaño, ojo, con mucha paciencia para no cruzar ninguna pista.
El CNY70 tiene cuatro pines de conexión. Dos de ellos se corresponden con el ánado y cátodo del emisor, y las otras dos se corresponde con el colector y el emisor del receptor. Es importante fijarse bien en el lateral donde aparece el nombre del sensor, para identificar correctamente cada uno de los pines, a continuación podéis ver un pequeño esquema:

Conectamos los CNY70 en la placa de topos, todo tiene que quedar como se ve en las siguientes imágenes:
Parte inferior:
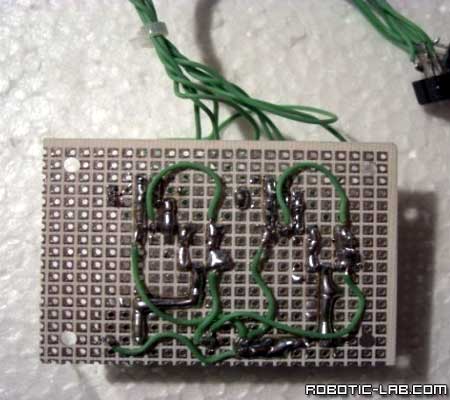
Parte superior:

Montaje:
Ahora sujetaremos la placa sobre la estructura, para separar la placa de la estructura, fabricaremos unos separadores con los tacos del nº6, tenemos que hacer cuatro de una longitud de 2 cm, y 4 tornillos de 3x30mm con sus arandelas y tuercas, para sujetarlo todo, ver fotos a continuación:


Bueno, llegado a este punto, procederemos a montar los servos y la rueda loca, lo primero que tenemos que hacer es trucar los servos, dentro del servo hay un motor de DC, la caja reductora y la electrónica de control, solo tenemos que eliminar la electrónica de control y dejar el motor y la reductora, en este tutorial no voy a explicar cómo hacerlo, para no complicar el tema, en internet existen sitios donde explican cómo hacerlo. Una vez tengamos los servos trucados, procederemos amontar las ruedas en los ejes del los servos y poner las escuadras.
Para hacer las escuadras, necesitamos cuatro vigas de hierro de cinco agujeros, son piezas que se pueden encontrar en kits de meccano, para hacer el ángulo, nos ayudamos con unos alicates, ver fotos:


Hay que hacer cuatro iguales.
Para montar las ruedas, utilizaremos cuatro tornillo de 3×30 mm con sus tuercas, y los discos de plástico que van con los servos, ver fotos.
En las fotos se puede apreciar como he montado la rueda en el eje del motor.


En esta foto se puede apreciar los dos motores con las escuadras y las ruedas montadas.

En la siguiente foto los motores ya están sujetos a la estructura:

Para hacer los agujeros hay que utilizar una broca del nº6, y para sujetarlo todo con tornillos de 4x5mm.
Para el montaje de la rueda loca necesitamos cuatros tornillos 4x15mm con sus hembras, la rueda loca y cuatro separadores, en la foto de abajo, se puede apreciar la rueda montada en la estructura, la longitud de los separadores es de más o menos 1 cm, para hacer los agujeros utilizaremos una broca de nº6.

Bueno, ahora nos faltará fijar los sensores CNY70 en el frontal del robot, los sensores tiene que estar a pocos milímetros del suelo, yo he utilizado dos vigas de hierro juntas, ver foto, todo lo he pegado con silicona, pero cada uno puede hacerlo a su manera.

Ahora nos falta pegar el portapilas en la estructura, nos ayudaremos con tiras de belcro, ver foto.

Ya solo nos falta hacer la conexión de alimentación, y conectar los motores en el circuito, fijaros bien en la foto, la regleta del medio es la alimentación, ojo con la polaridad, los motores hay que cruzarlos, en la regleta izquierda hay que conectar el motor derecho y viceversa, fijaros en la polarización de los motores.

Bueno, si habéis seguido todos los pasos, el aspecto final del robot es el que se ve en la foto de abajo, los ojos son opcionales.
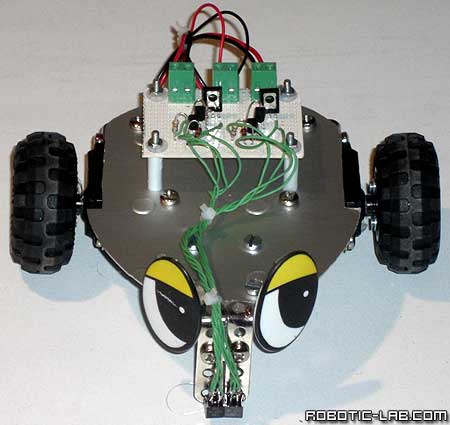
Ahora solo falta probarlo!!!
He intentado en hacer un tutorial fácil y ameno, espero que la gente se anime en realizarlo, porque la única forma de aprender es haciendo las cosas y cometiendo errores…
Saludos!
Ismael Serra Garrote
Circuito impreso por X-Robotics.
Hola Andrés,
El cny70 tiene cuatro terminales,dos de ellos son el ánodo y el kátodo del diodo y los restantes el colector y emisor del fototransistor.Lo primero que tienes que hacer es identificar los terminales,si te fijas en el tutorial hay una imagen del sensor con los terminales ya identificados.Una vez tengas indentificados los terminales hay que polarizar el diodo de esta forma:el positivo en el ánodo y el negativo al kátodo a traves de R1,en el fototransistor el positivo al colector y el negativo al emisor a traves de R2(la flechita),fíjate en el esquema eléctrico.
Espero haberte ayudado y suerte en el montaje.
que tal un saludo amigo quiero hacer el robot seguidor de lineas pero no consigo el CNY70 y tampoco su reemplazo… que me recomiendas que utilice?
Hola compañeros!!!
Una pregunta … es necesario hacer los dos circuitos por separado… puedo utilizar el mismo + y tierra para los 2 verdad????
Porq ya lo arme y nada!!!
Otra duda es… q checo continuidad en el BD140 uno d ellos memarca continuidad en todas y el otro no m da dl numero 2 al 3 … o 2 al 1…???? algo pasa nou???
Bueno grax… d antemano… y exenme la mano!!!!
Salu2…!!!
Hola Oscar,
Se puede hacer el circuito junto o por separado sin ningun problema.
Referente al transistor BD140,es posible que este estropeado, mejor remplazarlo.
Un saludo.
ola a todos, he visto que el robot parecia facil y me he puesto ha hacerlo, el cny70 cuando lo miro con una camara veo que esta encendido, la polaridad de los transistores la he consultado en el datashet y aqui el problema, mido con el voltimetro la potencia de las pilas y me da 5,9 v , mido el conector del motor, pero sinque este el motor conectado y me da 5,9 v, sin embargo cuando conecto el motor no hace nada, y el voltaje que marca con el motor conectado es de 0,1 v y no va.
PD: Si conecto el motor a las pilas si va.
hola buen tutorial! te hago una pregunta la linea tiene que ser negra blanca o que? puede ser luz?
pd no soy el hugo anterior xd xd
Hola Ismael
Voy a probar a hacer tu robot 😀
En cuanto pueda voy a comprar los materiales, pero tengo una duda: ¿los servomotores de cuanto tienen que ser?
Ya ire comentando en el foro como me va 😛
Gracias de antemano!
Hola Kuskus,
Yo he utilizado servos Futaba pero no necesariamente tienen que ser esto,puedes utilizar de otra marca.Eso si hay que trucarlos,el trucaje consiste en eliminar la electrónica de control y solo hay que dejar el motor dc y la reductora,suelen trabajar en una rango de tensión +/- 6V
Saludo y suerte en el montaje!!!
hola buen tutorial! te hago una pregunta la linea tiene que ser negra blanca o que? puede ser luz?
En este caso la linea tiene que ser negra,se suele utilizar cinta aislante.
Gracias!
Mañana mismo voy a comprar todo, ya ire comentando como me va.. 😛
hola tengo una duda puede servir el robot sitengo un qrd114 en ves del cny70 lo que se es que el qrd114 en un foto fototransistor y un LED infrarrojo y el cny70 es un fototransistor y un anodo (creo) bueno a lo que quiero llegar es si no hay forma de que sirva con mi qrd114 o otro componete que no sea el cny70 por que en mi ciudad no lo consigo porfa ayudame
hola jeje estube leyendo los comentarios y me encontre con la misma duda que yo tenia sobre el qrd1114 .. ahora lo que no se es si es que se pueden identificar el emisor,colector,anodo y el catado de la misma manera que la del cny70
y otra cosa como se polarisan los transistore ??? lo que se es que si la base es p = + , si es n = – lo mismo con el emisor y el colector n =+, p= – ok eso lo entiendo pero que tengo que hacer pasarle una una coriente negatiba por ejemplo XXXD nose ayudenme porfavor!
El qrd1114 es igual al cny70 pero el patillaje no es equivalente,echa un vistazo aquí.
http://www.adrirobot.it/datasheet/optoelettronica/pdf/QRD1114.pdf
Referente a la polarización de los transistores es como tu dices ni más ni menos.
Suerte en el montaje.
muchas gracias ismael ya voy a enpezar el montaje !
Hola Ismael. Estoy comenzando a hacer el seguidor, pero no he encontrado el bd140, puedo utilizar algun otro transistor?
Me dijeron me podria servir el 2sa1015gr, como ves?
Gracias
Hola,
Podrias probar con el BD136/138.El 2SA1015GR también es un equivalente y podría servirte.
Cuando lo tengas terminado cuelga algunas fotos para ver como te ha quedado.Para cualquier duda coméntalo en el foro,asin entre todos te echaremos una mano.
Gracias Ismael.
En cuanto lo tenga pongo las fotos.
hola que tal el circuito esta ya terminado pero se me presenta un problama con la fuente.
se descarga a los 3 minutos la bateria y se para, No se como solucionarlo espero una ayuda rapida.
Estoy trababajando con dos baterias de 9v en serie
Hola,
La tensión de trabajo del circuito es de 6V,suficiente con cuatro pilas R6.Si conectas dos pilas de 9v en serie se obtiene 18V y el circuito no esta diseñado para este voltaje,ademas con la consecuencia de estropear algun componente.Prueba con cuatro pilas R6 y me cuantas…
Saludos
hola estoy armando el seguidor de lineas pero no me funciona ya lo e revisado varias veces y no encuentro el error, el cny si esta vien polarizado ya q al mirarlo con una cam dig se una luz azul, la fuente con la cual lo estoy alimentando es de 5.6v pero a la salida me da 5.6v y el cny no me reconoce lineas negras ni blancas,los transistores los puse de acuerdo media en el multimetro me explico en donde el orden de emisor base y colector dan el beta, no se si esta es la forma mas adecuada de mirar un transistor. Algien podria subir una foto de como queda el circuito en la protoboard porfis.
gracias.
Primero revisa el estado y polarización de los transistores,seguramente el problema estara aquí.
Q1=BC547 NPN
Q2(BC557),Q3(BD140)=PNP
Regla de oro para la polarización de transistores bipolares.
Si es NPN la base recibe un potencial positivo(+) y el emisor negativo(-),la unión base-emisor queda polarizada en directa,y el colector positivo(+).
Si es PNP la base recibe un potencial negativo(-) y el emisor positivo(+),la unión base emisor queda polarizada en directa y el colector negativo.
Fíjate que en ambos casos el colector recibe un potencial opuesto al cristal que lo constituye.
Ahora bién,si estas utilizando los transistores del esquema, la identificación del patillaje es como sigue.
En Q1 y Q2,mirándolo en frente,con las letras mirando hacia tí,el colector es el terminal izquierdo,la base el central y el emisor el derecho.
El Q3=BD140 mirándolo hacia ti con las letras en frente,el emisor es el terminal izquierdo el colector el central y base el derecho.
me gustaria realizar el robot pero no se como pedir los motores de las ruedas si es por numero tipo o que? me podrias enviar esta información al correo
hola ismael:
mi nombre es beatriz y estoy cursando 5 semestre de mecatronica y como priner proyecto del corso me colocaron hacer una araña robot que al estrellarse un obstaculo busque un recorrido alterno.
hola ismael soy nuevo en la robotica y me preguntaba como aser un control para el robot y como aserlo porfa
es posible aser el control
ismael se puede aumentar la velosidad del motor porfa
ismael como de que tipo es el motor
Hola Marco,
Los actuadores que utiliza el robot son servos trucados.Si quieres aumentar la velocidad,podrías remplazar los servos por motores dc y la reductora.Existen en el mercado motores dc con un juego de ruedas dentadas para poder hacer diferentes relaciones de velocidad y fuerza,ahora bién,dependiendo del consumo del motor,se tendría que cambiarse el transistor de salida.
Un saludo
gracias ismael a tambien te pregunte si podia hacer un control para el robot me refiero para apagar y en encender
te mando saludos espero tu respuesta
Hola Marco,
Si solo quieres encender y apagar,tienes que añadir un simple interruptor.Si es esto a lo que te refieres.
Un saludo
perdoname ismael, he tratado de hacer un poco ese robot, tengo 14 años, he avansado bastante en esto y lo necesio para un proyeco tecnologico ,ya que yo voy en un colegio indusrial, y te quiero realizar tres preguntas:
1.en el esquema aparecen dos conexiones de van al posiivo, y otras dos que van al negaivo pasando por las resisencias R1 y R2, pero hay un problema, el CNY70 esta compuesto por el ánado, catado, emisor y colector, entonces el anado, al igual que el colector son positivos, y el katado y emisor son negativos, pero como se muestra en la imagen de el grafico de CNY70 en donde aparecen sus partes, el anado es diagonal al colector y son positivos, y el katado es diagonal al emisor, entonces tenemos dos positivos diagonales al igual los negativos, a mi criterio creeria que un negativo no recibe alimentacion de un positivo, entonces empieso a creer que ese esquema (esto no significa que te este insultando) esa mal ubicado las conexiones, por que ahí tendría que ir ubicado los positivos, al igual que los negaivos, si es que me esoy equivocando, envíame tu respuesta (con palabras; por internet; escrito; a esta pagina si es posible) indicandome que pare des sensor CNY70 va ubicado cada cosa, yo creeria que es asi: colector y anado en positivo, y katado con R1 y emisor con R2.
2.NO esoy consiguiendo los sevos, ¿podría ponerle unos comunes de 5V?
3.por ultimo, si este robott sigue lineas, ¿como puede disinguir una superficie de una linea? por que lo que esoy viendo aca es que no hay ninguna configuracion de software, o ningun programa.
Eso es todo y que Dios te bediga.
Hola adrian,
Referente al cny70,el dibujo que hay en el tutorial para la identificación de sus terminales es correcto,si que es verdad que si observas el sensor en el esquema y luego te fijas en el dibujito puede haver alguna confusión.El diodo hay que polarizarlo en sentido directo,positivo (ánodo) y negativo (kátodo),el fototransistor al ser NPN positivo al colector y negativo al emisor.Solo tienes que indentificar bien los terminales y aplicar la polaridad correcta.
Puedes remplazar los servos por motores dc con reductora que trabajen con una tensión 5v,ten en cuenta el consumo de los motores para no dañar los transistores.
El robot sigue la linea por un fenómeno físico,las superficies blancas reflejan la luz y las negras la retienen.Esto lo hace el cny70,cuando topa con una superficie blanca el fototransistor se pone en saturación (conduce) y cuando es negra en corte (no conduce),esta señal es acondicionada y actua sobre el sistema de locomoción del robot (motores).
Un saludo
Hola ismael he hecho el circuito per no me funciona creo que lo he heco bien. Lo unico que no entiendo es que tengo que conectar donde pone Vcc i en tierra. Gracias
si
ismael gracias te lo agradesco
amigo si pudieras poner un video para ver como funciona en la pista seria chevere!!!
Saludos
¿COMO DIABLOS SE PUEDE HASCER UN ROBOT PEZ ?
HOLA TODOS: les cuento que he realizado con mucho cuidado el robot sigue lineas, tal como lo planteas en el tutorial, pero tengo un gran problema … NO SIGUE LA LINEA….
he utilizado los sensores indicados CNY70. PERO CUANDO SE TAPA UN SENSOR EL MOTOR QUE CONTROLA SE PRENDE, Y CUANDO SE COLOCA A LA LUZ(EL SENSOR) DICHO MOTOR SE APAGA. PIENSO QUE FUNCIONA BIEN, PERO CUANDO SE COLOCA SOBRE LA LINEA QUE DEBE SEGUIR, NO LO HACE…..
POR FAVOR SI ALGUIEN LO HA HECHO FUNCIONAR ADECUADAMENTE COMO DICE EL TUTORIAL, LE AGRADECERIA SU VALIOSA AYUDA.
DEBO PRESENTARLO PARA UN TRABAJO DEL COLEGIO Y TENGO SOLO UNA SEMANA PARA TERMINARLO Y ENTREGARLO.
AGRADEZCO SU VALIOSA COLABORACION.
ATTE
terucos
Hola,
Cuando pones el robot en el circuito,concretamente que hace?
Hay diferencia de contraste entre la linea negra y la superficie blanca?
Un saludo
Hola:
Esto de verdad funciona? Porque no me voy a gastar el dinero en los materiales sin luego no hace nada… Por favor contestad
Hola a todos!
Por fin algo que sirve como introducción básica, que es lo que tanta falta nos hace a muchos. No he buceado mucho pero debe ser muy interesante el blog y con abundante material por lo que se ve!.
Ya me pongo a hacer este proyecto!. ¡Muchas gracias Ismael!.
Ayuda mucho a gente que quiere aprender este tipo de blog!.
Te felicito!.
OYE ¿QUE TIPO DE MOTOR SON LOS QUE SE NESE SITAN PARA EL ROBOT?CONTESTA Y SI TIENES LAVADORA AHI LAVEMOS
A
OTRA PREGUNTA ¿DE QUE TAMAÑO TIENEN QUESER LAS RUEDAS?ORA SI AHI TE VES.
hola voy a aser este robot para un proyecto, pero mi maestro me pidio un semaforo en el para que el carro pueda detenerse, yo me imagino que necesitaria un sensor o algo asi pero no se!!!
necesito tu ayuda ismael please !!! tienes una idea..???
exelnte blog
hola mi pregunta es que si no encuentro el transistor bd140 cual otro equivalente podria utilizar?
saludos.
Hola Ismael!
Ya he construido el circuito y funciona a la perfeccion! Pero me gustaria añadirle un detalle, un led blanco para que el funcionamiento del circuito y del robot fuera mas gráfico (que se encendiera cunado el motor girase). El caso esque he probado de ponerlo en medio y cuando le doy corriente sólo llega al led y no al motor. ¿Tendrias alguna idea de cómo situarlo para que funcionasen led y motor juntos?
Muchas gracias por todo. Muy buen tutorial. Nos vemos!
Hola,
Prueba de conectar el led con su resistencia limitadora en paralelo con el motor,entre el colector del transistor Q3 y tierra,a ver si te funciona.
Ya me contarás!!
Un saludo
Gracias Ismael, funciona!
Y ahora, a seguir trabajando!
hola ps que bn sta chido tu proyecto, lo estoy haciento pero tengo varios problemillas ya cheque todo el cicuito, cheque la polaridad de los sensores, de los transitores y todo pero al conectarlo el motor solo gira y no se detiene.
pero tambien una cosa e que remplace los trancitores bd140 por unos bd136.
aunque ya se como es su polaridad de cada uno de los transitores no se como colocarlos en el plano bien supongo que eso es lo que me falla.
ademas como se que los sensores sirven porque no veo nada sospechoso porfa si puedes ayudarme t lo agradeceria mucho porque es un poyeco de mi schoool porfa