
Este tutorial pretende ser una guía fácil y amena, para la realización de un sencillo robot rastreador de líneas (no microcontrolado).
Personalmente creo que para los que empiezan desde cero, es mejor armar un robot sencillo y que no utilice microcontroladores, si no, circuitos que contengan componentes discretos, y de paso aprenden algo de electrónica básica, lo mismo digo para la parte mecánica. Bueno, vamos al grano!!!
Componentes necesarios para el chasis y mecánica:
- Chapa de Aluminio o Madera de 40x40cm. – 1 Unidad.
- Tacos del 6 largos – 5 Unidades.
- Rueda Loca- 1 Unidad.
- Servos de Rotación Continua (o modificados) – 2 Unidades.
- Ruedas (de unos 5cm de diámetro) – 2 Unidades.
- Tornillos de 3x30mm con arandelas y tuercas – 8 Unidades
- Tornillos de 4x10mm con tuercas – 12 Unidades.
- Tornillos de 4x15mm con tuercas – 4 Unidades.
- Vigas de hierro de 5 agujeros – 6 Unidades.
- Tira de Velcro Adhesivo – 1 Unidad.
Componentes necesarios para la electrónica:
- Protoboard – 1 Unidad.
- Resistencias Necesarias:
2 Resistencias R1,R4 680 Ohm.
2 Resistencias R2,R5 10k Ohm.
2 Resistencias R3R6 2k2 Ohm. - Transistores Necesarios:
2 Transistores Q1,Q4 BD140.
2 Transistores Q2,Q5 BC557.
2 Transistores Q3,Q6 BC547. - Otros Componentes:
J1 Regleta 2 Terminales – 1 Unidad.
J2,J3 Regleta 2 Terminales – 2 Unidades.
OPT1,OPT2 CNY70 – 2 Unidades. - Portapilas de 4 pilas AA – 1 Unidad.
Herramientas necesarias:
- Taladrador.
- Sierra de Calar.
- Cutter.
- Pistola de pegamento térmico.
- Brocas nº6 y nº3
Paso 1 (El Chasis):
Empezaremos por la estructura, yo he utilizado aluminio, pero si queréis, también podéis utilizar madera, he realizado una plantilla con el diseño que yo he usado, podéis crear el vuestro o usar este.
Vista de la estructura, ya cortada y con los agujeros realizados:

Para cortar el aluminio yo utilizo una sierra de calar con una hoja para cortar Hierro.
Paso 2 (La Electrónica):
Bueno, una vez tenemos la estructura hecha, el siguiente paso será cortar la protoboard con las siguientes medidas 6,5 cm ancho por 4,5 cm para ello podemos usar un cutter, así debe quedar:

Para hacer los agujeros en la placa de topos, que nos servirán para sujetar la placa en la estructura, utilizaremos el taladro con una broca del nº3, una vez tenemos los agujeros hechos en la placa, tenemos que hacer otros en la estructura que coincidan con los de la placa.
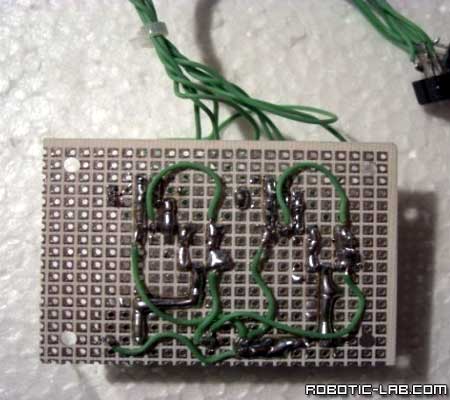
A continuación, procederemos a insertar los componentes, fijaros bien en el siguiente esquema, ayuda mucho:

Hay que hacer dos circuitos iguales, montados en la placa de topos, cada uno actúa en un motor, cuidado con la polarización de los transistores, las resistencias no necesitan polarización, soldad las regletas, para soldar los componentes, podéis utilizar trocitos de cable o estaño, ojo, con mucha paciencia para no cruzar ninguna pista.
El CNY70 tiene cuatro pines de conexión. Dos de ellos se corresponden con el ánado y cátodo del emisor, y las otras dos se corresponde con el colector y el emisor del receptor. Es importante fijarse bien en el lateral donde aparece el nombre del sensor, para identificar correctamente cada uno de los pines, a continuación podéis ver un pequeño esquema:

Conectamos los CNY70 en la placa de topos, todo tiene que quedar como se ve en las siguientes imágenes:
Parte inferior:
Parte superior:

Montaje:
Ahora sujetaremos la placa sobre la estructura, para separar la placa de la estructura, fabricaremos unos separadores con los tacos del nº6, tenemos que hacer cuatro de una longitud de 2 cm, y 4 tornillos de 3x30mm con sus arandelas y tuercas, para sujetarlo todo, ver fotos a continuación:


Bueno, llegado a este punto, procederemos a montar los servos y la rueda loca, lo primero que tenemos que hacer es trucar los servos, dentro del servo hay un motor de DC, la caja reductora y la electrónica de control, solo tenemos que eliminar la electrónica de control y dejar el motor y la reductora, en este tutorial no voy a explicar cómo hacerlo, para no complicar el tema, en internet existen sitios donde explican cómo hacerlo. Una vez tengamos los servos trucados, procederemos amontar las ruedas en los ejes del los servos y poner las escuadras.
Para hacer las escuadras, necesitamos cuatro vigas de hierro de cinco agujeros, son piezas que se pueden encontrar en kits de meccano, para hacer el ángulo, nos ayudamos con unos alicates, ver fotos:


Hay que hacer cuatro iguales.
Para montar las ruedas, utilizaremos cuatro tornillo de 3×30 mm con sus tuercas, y los discos de plástico que van con los servos, ver fotos.
En las fotos se puede apreciar como he montado la rueda en el eje del motor.


En esta foto se puede apreciar los dos motores con las escuadras y las ruedas montadas.

En la siguiente foto los motores ya están sujetos a la estructura:

Para hacer los agujeros hay que utilizar una broca del nº6, y para sujetarlo todo con tornillos de 4x5mm.
Para el montaje de la rueda loca necesitamos cuatros tornillos 4x15mm con sus hembras, la rueda loca y cuatro separadores, en la foto de abajo, se puede apreciar la rueda montada en la estructura, la longitud de los separadores es de más o menos 1 cm, para hacer los agujeros utilizaremos una broca de nº6.

Bueno, ahora nos faltará fijar los sensores CNY70 en el frontal del robot, los sensores tiene que estar a pocos milímetros del suelo, yo he utilizado dos vigas de hierro juntas, ver foto, todo lo he pegado con silicona, pero cada uno puede hacerlo a su manera.

Ahora nos falta pegar el portapilas en la estructura, nos ayudaremos con tiras de belcro, ver foto.

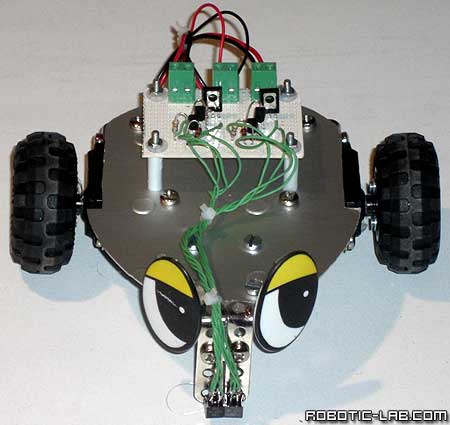
Ya solo nos falta hacer la conexión de alimentación, y conectar los motores en el circuito, fijaros bien en la foto, la regleta del medio es la alimentación, ojo con la polaridad, los motores hay que cruzarlos, en la regleta izquierda hay que conectar el motor derecho y viceversa, fijaros en la polarización de los motores.

Bueno, si habéis seguido todos los pasos, el aspecto final del robot es el que se ve en la foto de abajo, los ojos son opcionales.
Ahora solo falta probarlo!!!
He intentado en hacer un tutorial fácil y ameno, espero que la gente se anime en realizarlo, porque la única forma de aprender es haciendo las cosas y cometiendo errores…
Saludos!
Ismael Serra Garrote
Circuito impreso por X-Robotics.
se supone que al poner la pila los motores debe empezar a girar?
vamos porfavor a se como esta polarizados los transitores pero aun no comprendo como se colocan en el diagrama porfabor nesesito de tu ayuda
man de todas maneras gracias eh te pasaste bueno lo armare px pero aun me queda la duda de como armar mi bipedo px….xD de todas maneras gracias men te pasaste
Hola Rooger,
Puedes utilizar el bd-138/bd136
Un saludo
Hola casovi,
Revisa bién el conexionado de los cny70 y su polaridad.Luego identifica la base,emisor y colector del BC547,al ser un NPN la base recive un potencial (+),el emisor (-) y el colector(+).Para el BC-547 y el BD140 al ser PNP la base (-) el emisor (+) y el colctor (-).
Un saludo y me cuentas.
GRAXXXXXXX espero pueda continuar ya te cuento como va
oie que significan las lineas en el plano???????? porfa
hola de nuevo ya vi el error era el transitor Q3 ya lo puse bien y el circuito funciona bien grasiias por tu ayuda
pero quisiera saber como hacerle para que siga la linea blanca????? sale graxxx por todo
Hola,
Disculpa, acá donde vivo no encuentro el CNY70 y lo quiero hacer manualmente me podrias decir como?
O recomneadar algo?
umm tambien no encuentro el transistor q3 BD140 lo quiero reemplazar por un BD136 no afectará?
Espero respuesta gracias….
Prueba en cambiar el BC547(npn) por un BC557(pnp) para invertir la señal procedente del cny70,es posible que te funcione.Yo no lo he probado,ya me contarás…
Un saludo
grasias lo intentare sale graxxx
gracias.. lo hare para seguir en mi aprendisaje de electronica
disculpa no me quedó claro como se conectan las pilas, me puedes orientar.. Gracias
hola ismael q buen tutorial gracias!!
mi pregunta es q si es estrictamente necesario utilizar servos?? o se pueden usar motores mas sencillos como los de una cassetera dfe radio?? gracias…
HOLA DISCULPA EH TRATADO POR DOS SEMANAS HACER EL CIRCUITO PERO NO LO ENTIENDO POR Q NO ME FUNCIONA NO SE SI ME PODRIAS SUBIR UNA FOTO EN PROTOBOARD PERO EN LA TARJETA BLANCA POR Q NO LO PIENSO SOLDAR AUN CON UN SOLO SENSOR POR Q EL OTRO ME BASARE EN EL PRIMERO PARA HACER EL OTRO SI NO ES MUCHA LA MOLESTIA PLIS
Hola ivangt,
No es necesario que sean servos,puedes utilizar motores dc pero tendras que añadile una reductora.Ten encuenta el consumo de los motores para no dañar los transistores.
Buenas,
me gustaría saber como probar el robot, lo tengo montado en protoboard pero no hace nada de nada!!! :S
Hola Nuria,
Mándame una foto del montaje en la protoboard para ver si te puedo ayudar.e-mail [email protected]
Un saludo
HOLA ISNMAEL HICE LOS MISMO SEGUI EL DIASGRAMA PERO NO HACE ND COMO DICEN ARRIBA Q PUEDO HACER GRACIAS ESPERO TU RESPUESTA
Hola Ismael.
Tengo unas preguntas sobre algunas partes.
1. Los servos trucados se pueden sustituir con los de corriente continua?
2. Las regleetas son necesarias?
3. La estructura puede ser de otro material?
Porfavor necesito respuestas.
m MSN o E-mail es [email protected]
Gracias:D
Hola ismael!
Todo me funciona correctamente menos una cosa: los motores funcionan cuando ven blanco y se paran cuando ven negro… ¿Tienes idea de cual es el problema?
Gracias
Hola Kuskus,
Tendría que ser al reves.
¿ Cómo has conectado los cny70?
Y los transistores??
El circuito te funciona,pero has invertido la lógica.El robot te funcionaría sobre una linea blanca y fondo negro.
Mándame por e-mail en forma de esquema,como has conectado todos los componentes y que tipo de transistores has utilizado.
Un saludo
Mi e-mail [email protected]
hola soy estudiante de ing electronica aca en Perú y bue mi pregunta es son 6V para cada circuito?? es decir para cada motor?? o esos 6V se reparten para los dos circuitos?? o sea para los dos motores solo eso .. y gracias x este tutorial =)
Que servos estas usando?? porque cuando fui a comprar me estaban dando un hitech pero tenia 3 conectores y no dos como los que tienen en la foto que pusiste
Los servos hay que trucarlos.En el interior del servo hay un motor dc,una reductora y la electrónica de control,de el salen tres cables,el negro y rojo son los de alimentación y un tercero el de control.El trucaje consiste en eliminar la electrónica de control y solo dejar el motor dc y la reductora con los cable de alimentación, que se conectan directamente al motor dc.
http://www.iearobotics.com/proyectos/cuadernos/ct2/ct2.html
Un saludo
puedes poner un video mostrando el resultado de lo realizado ??
Hola liz,
Aquí tienes el video del sigue lineas.
http://www.youtube.com/watch?v=2RPKlcZneIM
Este es mi blog personal
http://roboticayelectronica.blogspot.com/
Un saludo
OLA SON GENIALES PORFA MANDANOS MAS SON INCREIBLES
calidad las foto me gustaria construirlo.. mas fino el diseño0 me gustaria tenerel diagrama en el protoboa para presentar un trabajo ayudame pana este es mi [email protected] espero atentamente su respuesta…. nota esta fina la foto j ejeje mas fino
me gustaria costruir para un proyecto… me lo pondrias mandar el diagrama para montarlo en un protoboa para presentar un trabajo aydame este es mi …[email protected]…. nota esta depinga las foto jejej
Fabuloso Ismael. Estoy practicando el circuito con mis alumnos de Ciclo Formativo de Grado Medio. Tenemos entre manos las puertas lógicas y es un ejemplo que les tiene muy motivados. Lo sencillo del circuito y los resultados conseguidos es una muy buena combinación.
Gracias por el comentario.Me alegro que te haya gustado y que te sirva para motivar tus alumnos en tus clases.
Mi blog personal
http://roboticayelectronica.blogspot.com/
Un saludo
hey…hola soy yo de nuevo que tal..bpues mira no c si me recuerdes…el robot q habia echo,el del tutorial, lo utilice para una competencia, el famosicimo del poli pero de secundarias, el robot fue un exito, pero cometimos un gran error….enves de ponerc cervos trucados pusimos los motores dc asi sin nada y al principio todo bien pero cuando ya tenia menos pila iva muy despacio., pero ubirera sido muy fasil ganar, a comparacion de los de media superior, hasta me hice amigo de un campeon mundial…muy beno …..bueno el punto es que vamos a volver a ir a ese concurso pero ahora queremos aumentarle un puente h analogo con trancitores NPN,a este mismo circuito, tengo masomenos la idea pero no se bn como unir los dos circuitos si me podrias ayudar t lo agradeseria mucho,,,,,,xfa
Hola casovi,
Dices que pusistes dos motores dc sin reductora??? y te funciono??.
Un motor dc sin reductora (engranajes) no tiene par de fuerza,es necesaria la reductora.
El puente en H permite cambiar el sentido de giro de un motor dc,ahora bien,es posible añadirle un puente en H al circuito,pero tendría que modificar algunas partes del circuito y hacer algunas pruebas.Si quieres échale un vistazo
a mi blog ersonal,donde hay un sigue lineas con puente en H.No es el mismo que el del tutorial,pero es un buen diseño.
http://roboticayelectronica.blogspot.com/2008/12/robot-seguidor-de-lineas-mejorado.html
Si te decides en hacerlo,te echo una mano.
Un saludo
esque tengo una idea donde uso un poco de logica….si a este circuito solo se le conectara las salidas hacia el motor motor???? supongo q si se puedo…. grax por tu ayuda… aqui sta el blog del puente h:
http://images.google.com.mx/imgres?imgurl=http://3.bp.blogspot.com/_cg7SpBv9sAw/SfiE5DacauI/AAAAAAAAALc/1PiZDwHKlCI/s320/Puente%2BH%2BNPN.bmp&imgrefurl=http://fuhrer-luftwaffe.blogspot.com/2009/04/puente-h-con-transistores-npn.html&usg=__VCvSSv7l4Rex3cSwh9FDLOVE1Wo=&h=218&w=320&sz=15&hl=es&start=1&um=1&itbs=1&tbnid=Xw1w41Cf6vmUiM:&tbnh=80&tbnw=118&prev=/images%3Fq%3Dpuente%2Bh%2Banalogo%26um%3D1%26hl%3Des%26rlz%3D1T4GWYH_esMX296MX296%26tbs%3Disch:1
tengo un pequeño problema espero y me ayude
que tipo de regletas mas o menos necesita el robot
que me den las especificaciones necesarias por favor para que yo aga el mio mi correo es [email protected]
ola amigo sabes se ve genial este proyecto sera k me puedes colaborar para contruirlo como la simulacion…
Hola!Una pregunta,¿como hago para montar los CNY70 a los topos?Es la primera vez que me voy a animar a hacer un robot.
wuolaxx…. Oie muy urgntmente que pasaria si se le pone 9 voltios al circuito? Se quema o si lo soporta????…. Bueno t agradsco mucho tu ayuda…. Esque el que hice con el puente h como que tiene muy poca potencia….. Porfa….
Mejor no probarlo,el circuito no esta diseñado para trabajar a 9v,pero es posible que funcione y no dañe ningun componente.Ahora bien,esto no te segura mas potencia,es posible que el problema este en el diseño del puente en h,me refiero a que los transistores no trabajen en la zona de saturación por una mal polarización de la base,no se,tendría que revisar el circuito.
Un saludo
wuoplaxx q tal muxaz graziaz por tu ayuda ya pazo el concurso no ma fue todo un exito nuestro prototipo…. Funciono tal y como lo esperaba, si le puse el puente h y quedo geneal pero no inventes estuvimps a 10 centesimas de pasar a las semifinales y todo por un menso sensor que se desconecto…..pero estuvo geneal y ahora pienso hacer otro pero agregare un flip flop y un driver espero y me quede zale graxzxxxxxx…..por tu ayuda..
hola. mira para la escuela me piden construir un robot seguidor de lineas, y ps esncontre este robot.y lo voy a hacer, pero quisiera saber cuanto dinero se gastaria en lo que es el puro material para el circuito; como resistores, transitores, aunque sea un aproximado te dejo mi correo
[email protected]
t agredeciar muhco si me ayudas..
hola solo pregunto?
e armado todo segun el diagrama las recistencias no es muy caro todo solo mi pregunta es por que no jala al comlocar las pilas creo que lo e conectado bien espero alguna respuesta todo esta en protoboard
espero algun tipo de respuestas
el borregox…….XD
por favor me podrian decir cuanto cuesta aproximadamente hacer uno?
estoy en en 3 de la eso pa quien no sea de españa tengo 15 años y lo más dificil que he contruido es una grua de madera con un electroiman que cuando sube la carga se enciende un led y cuando baja se enciende otro, creis que seré capaz de construirlo? me recomendais otra cosa? lo unico que quiero es que sea vistosa y divertida (tiene que ser un robot que es para tecnologia)
EXELENTE, LO VEO MAS COMPRENSIBLES QUE OTROS TUTORIALES QUE HASTA ME ANIMADO A HACERLO.SOLO FALTO VERLO FUNCIONANDO EN UN VIDEO.
que onda ismael quisiera preguntarte como se que esta funcionando bien esque hace unos movimientos que hacen que no siga la linea
qiero saber cuanto cuestan los 2 servos mas baratos qe se pueden encontrar y puede usarse solo 1 o si tambien se puede usar algo parecido mas economico porqye solo vamos en7º, para hacer el proyecto para una clase y necesitamos lo mas barato posible