
Este tutorial pretende ser una guía fácil y amena, para la realización de un sencillo robot rastreador de líneas (no microcontrolado).
Personalmente creo que para los que empiezan desde cero, es mejor armar un robot sencillo y que no utilice microcontroladores, si no, circuitos que contengan componentes discretos, y de paso aprenden algo de electrónica básica, lo mismo digo para la parte mecánica. Bueno, vamos al grano!!!
Componentes necesarios para el chasis y mecánica:
- Chapa de Aluminio o Madera de 40x40cm. – 1 Unidad.
- Tacos del 6 largos – 5 Unidades.
- Rueda Loca- 1 Unidad.
- Servos de Rotación Continua (o modificados) – 2 Unidades.
- Ruedas (de unos 5cm de diámetro) – 2 Unidades.
- Tornillos de 3x30mm con arandelas y tuercas – 8 Unidades
- Tornillos de 4x10mm con tuercas – 12 Unidades.
- Tornillos de 4x15mm con tuercas – 4 Unidades.
- Vigas de hierro de 5 agujeros – 6 Unidades.
- Tira de Velcro Adhesivo – 1 Unidad.
Componentes necesarios para la electrónica:
- Protoboard – 1 Unidad.
- Resistencias Necesarias:
2 Resistencias R1,R4 680 Ohm.
2 Resistencias R2,R5 10k Ohm.
2 Resistencias R3R6 2k2 Ohm. - Transistores Necesarios:
2 Transistores Q1,Q4 BD140.
2 Transistores Q2,Q5 BC557.
2 Transistores Q3,Q6 BC547. - Otros Componentes:
J1 Regleta 2 Terminales – 1 Unidad.
J2,J3 Regleta 2 Terminales – 2 Unidades.
OPT1,OPT2 CNY70 – 2 Unidades. - Portapilas de 4 pilas AA – 1 Unidad.
Herramientas necesarias:
- Taladrador.
- Sierra de Calar.
- Cutter.
- Pistola de pegamento térmico.
- Brocas nº6 y nº3
Paso 1 (El Chasis):
Empezaremos por la estructura, yo he utilizado aluminio, pero si queréis, también podéis utilizar madera, he realizado una plantilla con el diseño que yo he usado, podéis crear el vuestro o usar este.
Vista de la estructura, ya cortada y con los agujeros realizados:

Para cortar el aluminio yo utilizo una sierra de calar con una hoja para cortar Hierro.
Paso 2 (La Electrónica):
Bueno, una vez tenemos la estructura hecha, el siguiente paso será cortar la protoboard con las siguientes medidas 6,5 cm ancho por 4,5 cm para ello podemos usar un cutter, así debe quedar:

Para hacer los agujeros en la placa de topos, que nos servirán para sujetar la placa en la estructura, utilizaremos el taladro con una broca del nº3, una vez tenemos los agujeros hechos en la placa, tenemos que hacer otros en la estructura que coincidan con los de la placa.
A continuación, procederemos a insertar los componentes, fijaros bien en el siguiente esquema, ayuda mucho:

Hay que hacer dos circuitos iguales, montados en la placa de topos, cada uno actúa en un motor, cuidado con la polarización de los transistores, las resistencias no necesitan polarización, soldad las regletas, para soldar los componentes, podéis utilizar trocitos de cable o estaño, ojo, con mucha paciencia para no cruzar ninguna pista.
El CNY70 tiene cuatro pines de conexión. Dos de ellos se corresponden con el ánado y cátodo del emisor, y las otras dos se corresponde con el colector y el emisor del receptor. Es importante fijarse bien en el lateral donde aparece el nombre del sensor, para identificar correctamente cada uno de los pines, a continuación podéis ver un pequeño esquema:

Conectamos los CNY70 en la placa de topos, todo tiene que quedar como se ve en las siguientes imágenes:
Parte inferior:
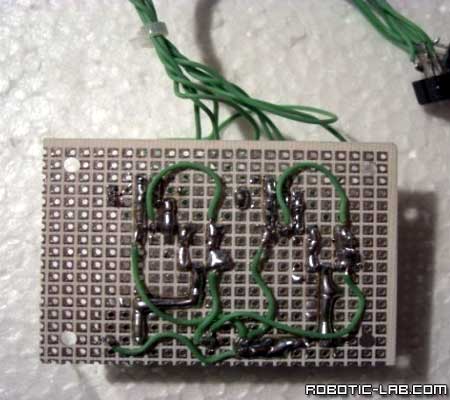
Parte superior:

Montaje:
Ahora sujetaremos la placa sobre la estructura, para separar la placa de la estructura, fabricaremos unos separadores con los tacos del nº6, tenemos que hacer cuatro de una longitud de 2 cm, y 4 tornillos de 3x30mm con sus arandelas y tuercas, para sujetarlo todo, ver fotos a continuación:


Bueno, llegado a este punto, procederemos a montar los servos y la rueda loca, lo primero que tenemos que hacer es trucar los servos, dentro del servo hay un motor de DC, la caja reductora y la electrónica de control, solo tenemos que eliminar la electrónica de control y dejar el motor y la reductora, en este tutorial no voy a explicar cómo hacerlo, para no complicar el tema, en internet existen sitios donde explican cómo hacerlo. Una vez tengamos los servos trucados, procederemos amontar las ruedas en los ejes del los servos y poner las escuadras.
Para hacer las escuadras, necesitamos cuatro vigas de hierro de cinco agujeros, son piezas que se pueden encontrar en kits de meccano, para hacer el ángulo, nos ayudamos con unos alicates, ver fotos:


Hay que hacer cuatro iguales.
Para montar las ruedas, utilizaremos cuatro tornillo de 3×30 mm con sus tuercas, y los discos de plástico que van con los servos, ver fotos.
En las fotos se puede apreciar como he montado la rueda en el eje del motor.


En esta foto se puede apreciar los dos motores con las escuadras y las ruedas montadas.

En la siguiente foto los motores ya están sujetos a la estructura:

Para hacer los agujeros hay que utilizar una broca del nº6, y para sujetarlo todo con tornillos de 4x5mm.
Para el montaje de la rueda loca necesitamos cuatros tornillos 4x15mm con sus hembras, la rueda loca y cuatro separadores, en la foto de abajo, se puede apreciar la rueda montada en la estructura, la longitud de los separadores es de más o menos 1 cm, para hacer los agujeros utilizaremos una broca de nº6.

Bueno, ahora nos faltará fijar los sensores CNY70 en el frontal del robot, los sensores tiene que estar a pocos milímetros del suelo, yo he utilizado dos vigas de hierro juntas, ver foto, todo lo he pegado con silicona, pero cada uno puede hacerlo a su manera.

Ahora nos falta pegar el portapilas en la estructura, nos ayudaremos con tiras de belcro, ver foto.

Ya solo nos falta hacer la conexión de alimentación, y conectar los motores en el circuito, fijaros bien en la foto, la regleta del medio es la alimentación, ojo con la polaridad, los motores hay que cruzarlos, en la regleta izquierda hay que conectar el motor derecho y viceversa, fijaros en la polarización de los motores.

Bueno, si habéis seguido todos los pasos, el aspecto final del robot es el que se ve en la foto de abajo, los ojos son opcionales.
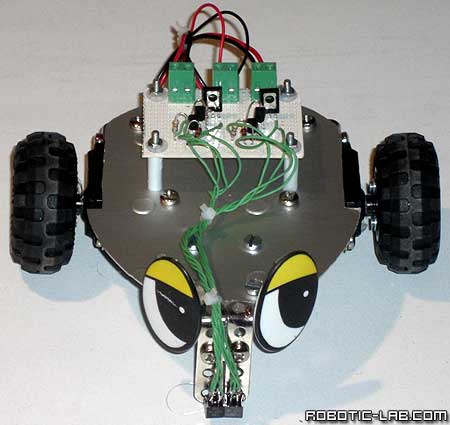
Ahora solo falta probarlo!!!
He intentado en hacer un tutorial fácil y ameno, espero que la gente se anime en realizarlo, porque la única forma de aprender es haciendo las cosas y cometiendo errores…
Saludos!
Ismael Serra Garrote
Circuito impreso por X-Robotics.
Genial, lo intentaré hacer mejor dicho lo haré…
Excelente robot! y excelente blog 😀
Bien Ismael, lo intentare hacer por alguna duda o problema tienes un email donde escribirte?
Gracias
Las dudas las puedes poner en el foro:
http://www.robotic-lab.com/foros/
Y todos intentaremos ayudarte!
Hola otra vez!
No me quedo claro como conecto los CNY40 y en donde se concetan en la placa, se hacen cuatro conecxiones ya q tiene 4 patas?
gracias!
Fijate bién en el esquema eléctrico.El cny70 tiene 4 terminales,lo primero que tienes que hacer,es indentificar las dos patitas del fototransistor el (colector y emisor),y luego el ánodo y el cátodo del diodo.El colector (cny70) se conecta al emisor del Q2 y Q3, el emisor (cny70) a la base del Q1.El diodo el K a tierra y el A al positivo.Ten encuenta la polarización del cny70.
Mejor que pongas tus dudas en el foro,será mas cómodo para todos.
cuanto masomenos puede llegar a costar todos estos materiales?
De 30€ a 40€,lo mas caro son los servos.
Saludos!!!
Funciona este robot con simples motores o tiene q ser con servos??
Gracias
El circuito está diseñado para funcionar con motores dc que trabajen con una tensión de mas o menos 5v-6v,yo he utilizado dos servos trucados,el trucaje consiste en eliminar la electrónica de control y solo dejar el motor y la reductora.Podrian ponerse motores con una tensión mas baja,pero se tendrian que hacer modificaciones en el circuito.No necesariamente tienen que ser servos.
Hola ismael, intente hacer el sigue lineas, pero no puedo hacer que funcione, el motor que le conecto gira, pero nunca se detiene, el sensor si sirve, pero no influye en el motor, me imagino que el problema esta en los transistores, pero no se bien. Pero tengo un problema con el cto, las resistencias que van directo al CNY70 si las conecto a tierra no prende el sensor, pero cuando lo conecto a vcc funciona, que onda con eso? espero me puedas ayudar. Saludos
Hola M-chaos,vamos por partes,revisa primero la polaridad del CNY70.
En el interior del cny70 hay un diodo y un fototransistor,lo primero es identificar el patillaje.
El diodo hay que polarizarlo en sentido directo,me explico,para polarizarlo hay que aplicar el positivo al ánado (triángulo) y el negativo o tierra al cátodo(raya),ver esquema.
El fototransitor hay que aplicar el positivo al Colector y negativo al emisor (flechita) y las resistencias R1,R2 a tierra o negativo.
Si no te funciona,revisa el estado de los transistores y su polarización.
Saludos y suerte!!!
donde se conecta la pila?
tengo un problema con los transistores
me podrias decir kual es el emisor la base y el colector de los transistores y si son npn o pnp
gracias
Hola sebas,Q1(BC-547) es del tipo npn, y Q2(BC-557),Q3(BD-140) son del tipo pnp.La mayoría de tester digitales de hoy en dia,incorporan unos orificios para poder indentificar los terminales del transitor,incluso su ganancia,existe otro procedimiento con el ohmímetro pero es un poco lioso.
Ten encuenta estas reglas para poder polarizar bién un transistor.Si la base es(N) hay que aplicar(-),y si es (P)(+),lo mismo para el emisor.El colector si es (N) aplicar (+) y si es (P) aplicar(-),si te fijas bien,siempre en el colector hay que aplicarle una polaridad opuesta al cristal que lo forma.
Espero haberte ayudado.
esoy haciendo un robot igual pero el problema mio es que no se como mantener la corriente en el servo motor por que trabaja con pulso asi que me seria de gran ayuda como componerlo para que funcione ahi les dejo mi correo [email protected] ara que me ayuden porfis
Amigos una pregunta, alguien sabe como hacer este mismo sigue linea pero utilizando un pic?? agradecería mucho su ayuda
Hola sebastian,primero tendrias que pensar el tipo de pic a utilizar,los hay de baja,media y alta prestanciones,luego conocer la arquitectura interna registros,memoria…
Los pics se suelen programar en amsambler,un lenguaje de bajo nivel.Para grabar el programa en la memoria del pic,necesitarás un grabador de pics,en fin,si buscas por internet encontraras mucha información relacionada con el tema.
Saludos y espero haberte ayudado
hola esotoy haciendo este robot , pero tengo porblemas con el circuito segui al pie de la letra las instrucciones y no doy pie con bola, tengo todo coenctado y no pasa nada, como puedo encontrar la falla, me podrias orientar un poco sobe los problemas que pudieran ser.
Gracias
olaa muy buenas los felicito por esta pag me ha servido mucho para adquirir nuevos conocimientos. Los invito a que sigan adelante Gracias chavooooooooooooo.
como truco el servo enviame un link ami mail [email protected]
Hola Mariano,revisa el conexionado de los cny70 y la polaridad de los transistores,probablemente el problema venga de los transistores.
hola , se pueden usar remplasos en los transistores ,se puede hacer la parte del sensor con un fotodiodo y un fototransistor , ya lo intente y no funciona , es necesario que no sean remplasos..?????????
hola ismael disculpa mi ignorancia pero que son los J1 J2 J3 dice power pero aun asi no me quda claro y tmb como es la alimentacion de todo el rastreador
pero si eso se a exo de siempre sin robots ni pollas
tu cojes una gallina le pintas una ralla de tiza en el suelo y la sigue asta el final,xD
(Es verdad, probadlo)
uhm se podria agregar un PIC a ese circuito ???
Hola hugo,no es posible añadirle un pic al circuito,no tiene sentido,j1,j2,j3 son una especie de conectores.
hola ayudenme porfavor me urge digame komo funciona el CNY70 y que tipos de lineas usa de q son deven ser especiales o como digamme mi koreo q es [email protected]
contesten porfavor
disculpa ismael, el rastreador que estoy a punto de hacer tiene buen funcionamiento ??? es decir al momento de seguir las lineas y todo…
Yo lo estoy haciendo, pero le hice modificaciones, yo cambié la R del Katodo, puse una de 100 Ohm, en ves del Q1 y Q2 puse un integrado LF353 y el ves del Q3 puse un TIP 31 para darle mas potencia además lo alimento por la Inversora y la No-inversora la deje sin conexión. Lo único difícil es lo del motor ya que ese tipo es muy costoso y me toca hacer un sistema de engranes o piñones 🙁
hola
estoy interesada en hacer este proyecto pero tengo duda acerca del servomotor, lo puedo hacer con cualquier servomotor o tiene que ser un modelo especifico?
gracias por su ayuda
Hola ismael yo empese este proyecto todo el circuito esta armado pero no funsiona no se si me podrias guiar por web cam mira no se si sea por los transistores no se si cada uno se conecta como bienen en el diagrama el pocicion al nombre porfavor te pido tu ayuda.
me parece fantastico
Chris puedes utilizar cualquier servomotor,lo único que tienes que hacer es eliminar la electrónica de control y solo dejar el motor con la reductora,eso si el servo tiene que ser de rotación continua,te lo digo por que hay servos que tienen un recorrido de 0-180º.
Hola Erik,revisa bién el estado de los transistores y su polarización asin como los cny70.Para cualquier duda e-mail [email protected]
hola, me ha encantado el tutorial esta de lujo, gracias ya que esto me sera de yuda que por estos dias de navidad ando con ganas de armar algo electronico que me presente un reto.
saludos desde Mexico
Esta muy bien yo ya e construido mi robot sigue lineas, mi padre y yo tubimos un problema que era que al ponernos acerlo tubimos que buscar en internet como se ponian las piezas del sistema electrico. pero esta muy bien y es muy sencillo de acer
Gracias 😀
interesante lo are uno mi estimado me facina el mundo de la robotica hasta la prox
hola ismael me parecen exelentes las formas en el armado y quiero llevarlo a cabo pero mepodrias decir mas o menos a q´ velocidad ¿avansa? gracioas y adios.
hola el tutorial es muy bueno y ya hice mi detector de lineas ademas adicione dos detectores infrarojos para que detectara obstaculos pero no me quiere funcionar, entonces de que manera se pueden colocar para que funcionen??
hola!!! me parece excelente la exposicion de este robot, solo tengo una pregunta hay una manera de regularle la velocidad y a ke velocidad avanza. bueno eso es todo aa y gran web felicidades
KAYK:
Excelente proyecto y muy bien desarrollado.
Fíjate que desarrolle el diagrama en un simulador pero con el BD140 como pnp, no funciona, se lo cambié y le agregué un npn y con esto funcionó el motor (en la simulación). Fui a ver las características al NTE y me dice que el BD es un npn.
Crees que hay un error con este transistor?
Saludos cordiales
El BD140 es un PNP y si lo sustituyes por un NPN no funcionara,ya que estara mal polarizado.
¿ Y dices que con un NPN te ha funcionado???
Transistores que intervienen en el esquema.
Q1=BD547 NPN
Q2=BD557 PNP
Q3=BD140 PNP
En la lista de componentes (transistores) he visto que se puede hacer una lectura erronia.
Lista correcta
————–
2 Transistores BC547 npn Q1
2 » BC557 pnp Q2
2 » BC140 pnp Q3
Recordad que es todo por duplicado ya que hay que hacer dos circuitos idénticos.
Esta bueno el tutorial, la forma en que explicas el armado del chasis es buena y te ahorra el tener que pensar en un nuevo diseño, aunque el unico punto en contra seria que este diseño jamas funcionaria para un concurso de robotica, generalmente en los concursos se necesita velocidad,y este diseño no es el mas correcto, ya existe uno muy utilizado y probado, los unicos cambios se hacen a la circuiteria,para mejorar las prestaciones del seguidor, el diseño de curicuito de x-robotics es bueno, auqnue no explican que utilizaras dos fuentes distintas para alimentar la circuiteria y los motores, ademas de necesitar un puente H.
Yo estoy terminando un nuevo seguidor para uno concurso de robotica, en cuanto lo tenga terminado taratre de subir las fotos y el tutorial, soy estudiante de 8º sem. de Ing. Mecàtronica.
hola me gusto tu proyecto que de hecho empece hacerlo pero tengo un problema lo que pasa es que el sensor CNY70 no lo consigo y pues no se con cual otro lo podria cambiar ya lo busque y no lo eh podido encontrar es la unica pieza que me hace falta y no se con que otro nombre lo podria conseguir o con que otro lo podria sustituir, espero y me pueda ayudar gracias por todo espero su mensaje
Hola Luis podrias probar con el qrd1114 que es un equivalente al cny70.Cuando lo tengas terminado cuelga algun video para que podamos verlo.
Saludos
quede sorprendido algo tan elemental y la vez tan sencillo. gracias
hola, estoy haciendo este robot pero tengo una duda ya que no sé casi nada de electrónica… Cómo conectaste los CNY70 a la placa? veo que con algún cable pero, qué cable es?
¡¡¡¡¡¡¡¡ fue muy bueno
espero q m mandes tutoriales te mando saludos¡¡¡¡¡¡
ATTE: ever