
Este tutorial pretende ser una guía fácil y amena, para la realización de un sencillo robot rastreador de líneas (no microcontrolado).
Personalmente creo que para los que empiezan desde cero, es mejor armar un robot sencillo y que no utilice microcontroladores, si no, circuitos que contengan componentes discretos, y de paso aprenden algo de electrónica básica, lo mismo digo para la parte mecánica. Bueno, vamos al grano!!!
Componentes necesarios para el chasis y mecánica:
- Chapa de Aluminio o Madera de 40x40cm. – 1 Unidad.
- Tacos del 6 largos – 5 Unidades.
- Rueda Loca- 1 Unidad.
- Servos de Rotación Continua (o modificados) – 2 Unidades.
- Ruedas (de unos 5cm de diámetro) – 2 Unidades.
- Tornillos de 3x30mm con arandelas y tuercas – 8 Unidades
- Tornillos de 4x10mm con tuercas – 12 Unidades.
- Tornillos de 4x15mm con tuercas – 4 Unidades.
- Vigas de hierro de 5 agujeros – 6 Unidades.
- Tira de Velcro Adhesivo – 1 Unidad.
Componentes necesarios para la electrónica:
- Protoboard – 1 Unidad.
- Resistencias Necesarias:
2 Resistencias R1,R4 680 Ohm.
2 Resistencias R2,R5 10k Ohm.
2 Resistencias R3R6 2k2 Ohm. - Transistores Necesarios:
2 Transistores Q1,Q4 BD140.
2 Transistores Q2,Q5 BC557.
2 Transistores Q3,Q6 BC547. - Otros Componentes:
J1 Regleta 2 Terminales – 1 Unidad.
J2,J3 Regleta 2 Terminales – 2 Unidades.
OPT1,OPT2 CNY70 – 2 Unidades. - Portapilas de 4 pilas AA – 1 Unidad.
Herramientas necesarias:
- Taladrador.
- Sierra de Calar.
- Cutter.
- Pistola de pegamento térmico.
- Brocas nº6 y nº3
Paso 1 (El Chasis):
Empezaremos por la estructura, yo he utilizado aluminio, pero si queréis, también podéis utilizar madera, he realizado una plantilla con el diseño que yo he usado, podéis crear el vuestro o usar este.
Vista de la estructura, ya cortada y con los agujeros realizados:

Para cortar el aluminio yo utilizo una sierra de calar con una hoja para cortar Hierro.
Paso 2 (La Electrónica):
Bueno, una vez tenemos la estructura hecha, el siguiente paso será cortar la protoboard con las siguientes medidas 6,5 cm ancho por 4,5 cm para ello podemos usar un cutter, así debe quedar:

Para hacer los agujeros en la placa de topos, que nos servirán para sujetar la placa en la estructura, utilizaremos el taladro con una broca del nº3, una vez tenemos los agujeros hechos en la placa, tenemos que hacer otros en la estructura que coincidan con los de la placa.
A continuación, procederemos a insertar los componentes, fijaros bien en el siguiente esquema, ayuda mucho:

Hay que hacer dos circuitos iguales, montados en la placa de topos, cada uno actúa en un motor, cuidado con la polarización de los transistores, las resistencias no necesitan polarización, soldad las regletas, para soldar los componentes, podéis utilizar trocitos de cable o estaño, ojo, con mucha paciencia para no cruzar ninguna pista.
El CNY70 tiene cuatro pines de conexión. Dos de ellos se corresponden con el ánado y cátodo del emisor, y las otras dos se corresponde con el colector y el emisor del receptor. Es importante fijarse bien en el lateral donde aparece el nombre del sensor, para identificar correctamente cada uno de los pines, a continuación podéis ver un pequeño esquema:

Conectamos los CNY70 en la placa de topos, todo tiene que quedar como se ve en las siguientes imágenes:
Parte inferior:
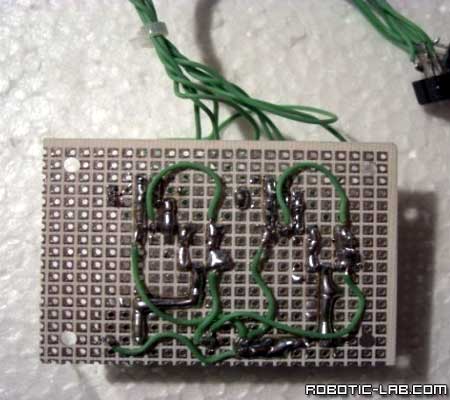
Parte superior:

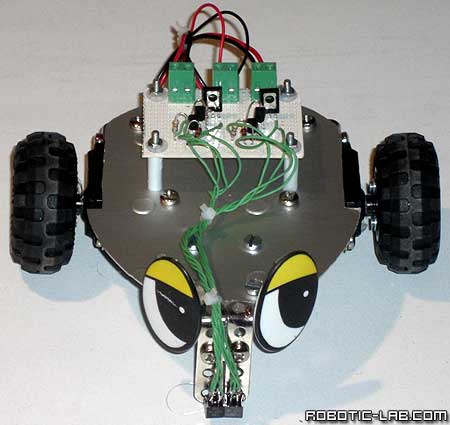
Montaje:
Ahora sujetaremos la placa sobre la estructura, para separar la placa de la estructura, fabricaremos unos separadores con los tacos del nº6, tenemos que hacer cuatro de una longitud de 2 cm, y 4 tornillos de 3x30mm con sus arandelas y tuercas, para sujetarlo todo, ver fotos a continuación:


Bueno, llegado a este punto, procederemos a montar los servos y la rueda loca, lo primero que tenemos que hacer es trucar los servos, dentro del servo hay un motor de DC, la caja reductora y la electrónica de control, solo tenemos que eliminar la electrónica de control y dejar el motor y la reductora, en este tutorial no voy a explicar cómo hacerlo, para no complicar el tema, en internet existen sitios donde explican cómo hacerlo. Una vez tengamos los servos trucados, procederemos amontar las ruedas en los ejes del los servos y poner las escuadras.
Para hacer las escuadras, necesitamos cuatro vigas de hierro de cinco agujeros, son piezas que se pueden encontrar en kits de meccano, para hacer el ángulo, nos ayudamos con unos alicates, ver fotos:


Hay que hacer cuatro iguales.
Para montar las ruedas, utilizaremos cuatro tornillo de 3×30 mm con sus tuercas, y los discos de plástico que van con los servos, ver fotos.
En las fotos se puede apreciar como he montado la rueda en el eje del motor.


En esta foto se puede apreciar los dos motores con las escuadras y las ruedas montadas.

En la siguiente foto los motores ya están sujetos a la estructura:

Para hacer los agujeros hay que utilizar una broca del nº6, y para sujetarlo todo con tornillos de 4x5mm.
Para el montaje de la rueda loca necesitamos cuatros tornillos 4x15mm con sus hembras, la rueda loca y cuatro separadores, en la foto de abajo, se puede apreciar la rueda montada en la estructura, la longitud de los separadores es de más o menos 1 cm, para hacer los agujeros utilizaremos una broca de nº6.

Bueno, ahora nos faltará fijar los sensores CNY70 en el frontal del robot, los sensores tiene que estar a pocos milímetros del suelo, yo he utilizado dos vigas de hierro juntas, ver foto, todo lo he pegado con silicona, pero cada uno puede hacerlo a su manera.

Ahora nos falta pegar el portapilas en la estructura, nos ayudaremos con tiras de belcro, ver foto.

Ya solo nos falta hacer la conexión de alimentación, y conectar los motores en el circuito, fijaros bien en la foto, la regleta del medio es la alimentación, ojo con la polaridad, los motores hay que cruzarlos, en la regleta izquierda hay que conectar el motor derecho y viceversa, fijaros en la polarización de los motores.

Bueno, si habéis seguido todos los pasos, el aspecto final del robot es el que se ve en la foto de abajo, los ojos son opcionales.
Ahora solo falta probarlo!!!
He intentado en hacer un tutorial fácil y ameno, espero que la gente se anime en realizarlo, porque la única forma de aprender es haciendo las cosas y cometiendo errores…
Saludos!
Ismael Serra Garrote
Circuito impreso por X-Robotics.
Todas las resistencias son de 1/4 de watio.
Mejor que sea de 2k2,pero puedes probar.
Un saludo
alguien me puede facilitar el circuito impresoooo? es urgentee¡¡
Gracias de antemano.
Buen proyecto ismael¡¡ de verdad
q tendria q cambiar si quiero hacer un seguilineas blanca
las resistencias son de 1/4w?
Tendo una duda, compre un servo de rotación continua, (s35/std) y me vino con tres cables, como hago, tengo que trucarlo?
Por cierto, las ruedas…compre unas parecida, pero no iguales en electran y no se como se ponen
tengo una inquietud por que el bd140 se calienta mucho utilizo 2 pilas de celular en serie de 3.7 v
serviría si le pego una rueda loca de plastico o la atornillo,o tiene que ser como esa? en caso de tener que ser como esa, donde la compro?
Ya truqué los motores le puse las ruedas, e hice el circuito en el protoboard, pero los motores giran todo el rato y no se como puedo probar que me funciona, antes de montarlo…
tengo 2 baterías de celular en serie de 3.7 voltios pero el bd140 se calienta demasiado me podrían decir porque.
hola quiero saber si has hecho un video
de como hacerlo
tio me as salvado la vida esto lo necesitaba para un trabajo y no tenia ni idea de como empezar ni de que se necesitaba, vamos ni puta idea gracias
Os pongo enlace de un coche parecido http://www.youtube.com/watch?v=0c-R-WoFp-8&feature=g-upl&context=G29b9302AUAAAAAAAGAA
espero que os sirva
Hola me gustaria saber cual es la tension de alimentacion del circuito, y tambien cual es la tension vce y la corriente de emisor (del sensor)cuando al sensor no le llegua luz, es decir, cuando esta en la linea negra, tambien cuales son esos mismos valores cuando si le llegua luz. Esque lo he mirado en un datasheet pero no me he aclarado mucho. Gracias
es necesario utilizar un servo o se pueden remplazar con algun otro motor?
che seria posible hacer que el robot fuera controlado por computadora?y tambien por control de vos?es que yo tengo una laptop y no se te pregunto si se podria,y como se hace
Cuanto tardaste mas o menos?¿
lo are pero demorare
XDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDDD
ola me preguntaba que tipo de linea sigue negra o blanca
Negra
Hola ismael quisiera saver si se puede utilizar otro sensor xq no consigo el cny70.gracias chau.
Si,el qrd1114 es su equivalente.A
Si,su equivalente es el qrd-1114,aquí tienes un poco de información.
http://www.datasheetcatalog.org/datasheet/fairchild/QRD1114.pdf
Un saludo
hey donde consigo los tacos?!
hola, puedo remplazar el el cny70 por qrd1114, se conectaria igual????
anodo + :patica larga
k- :patica corta
colector q1 y q2 :patica larga
emisor a la base de q1 :patica corta
En ferreterias
Buenas tardes ismael, no entiendo como conectar los sensores CNY70, y los transistores, si pudieras enviarme algo lo mas fácil posible ya que estoy viendo una electiva (robotica) y he tomado tu sigue lineas como proyecto final de curso, ya tengo casi todos los materiales, ( No consigo es el transistor BC557, cual puedo usar en reemplazo) en fin ya estoy armando y soldando, pero me falta colocar los sensores y transistores. La alimentación de las pilas puede hacerse directo a los dos circuitos? ósea uní los + de ambos y los – para hacer una sola conexión a las pilas, esta bien?
hola como puedo remplazar un servomotor y como puedo adaptrle a las ruedas
Puedes comprar un motor dc y ponerle la reductora,o bien comprar los servos y trucarlos,el trucaje consiste en quitar la electrónica de control y solo dejar el motor con su reductora.
La adaptación de las ruedas al eje motor tendras que ingeniar algun mecanismo.
Byte!!
hola quería saber como son las mediciones exactas tales como la longitud, el ancho, la separación de los agujeros etc.
me podrias explicar porfavor exactamente si sigo todos los pasos el robot seguira la linea de que color?¿ como le programo que la linea que el robot siga sea blanco o negra ?¿
hola quería saber como son las mediciones exactas del chasis del robot tales como la longitud, el ancho, la separación de los agujeros etc.
que es 2k2 ohm
saludo cordial, la presente es para solicitarle y si esta dentro de sus posibilidades me envie por internet el plano de conecciones total es decir la coneccion de la bateria, de los sensores, de los motores , trancistores porque no lo encuentro por ningun lado toda la información precisa de conecciones es decir solicito me faciliti el plano de conecciones y le quedo inmensamente agradecido ATT: jeison stiven cruz
nota:aclaro que se electricidad y electronica hace mucho tiempo
me gusto esta pagina
NO SE NI DE QUE RAYOS HABALS! jajaja te pagare muy bien si haces mi seguidor de lineas 😉 comunicate a 786-125-70-63 URGE!!!!
oooooooooo dios mio me alegra que yo aga un robot
Me parecio fenomenal el tutorial, dos amigos y yo planeamos echar andar el proyecto pero necesitamos saber aquellos que ya hayan hecho el robot me podrian decir si funciona y el presupuesto aproximado por favor, de ante mano gracias
Aquellos que gusten responder a mi comentario les dejo mi correo [email protected]
oye vi ke el carro se mueve pero no tan rapido como puedo hacer ke sea mas rapido??
como le puedo hacer para que me siga linea negra & linea blanca nomas invirtiendo donde esta Q1 porner Q2 Y Q2 donde esta Q1
donde consigo las partes electronicas que necesita el robot yo vivo en pansma
En cualquier tienda de electrónica o en tiendas online en internet,los componentes son fáciles de encontrar.
Un saludo
para que se utilizan los Servos de Rotación Continua
para que se utilizan los Servos de Rotación Continua
para las ruedas?
He realizado el ensamble en protoboard, así como esta en el circuito, tengo la pcb de este circuito, pero no funciona, he realizado con una pequeña variación, pero todo el tiempo gira el motor.
El motor es un servo de 5 kilo trucado, gira pero muy despacio.
Si utilizo motor de dvd o de grabadora y voltear este proyecto en la posición correcta los motores no tiene la suficiente fuerza para desplazarse.
se puede colocar mas transistores, que debo hacer, colocar mas pilas, a pesar de que utilizo pilas recargables de 2700ma y uzo cuatro
El problema no viene de los motores,revisa bien el conexionado de los cny70 y los transistores.Si me pasas una foto del circuito montado en la protoboard quizás pueda ver el fallo.
e-mail:[email protected]
Un saludo
hola una preguntototota: es forsozo el uso de servomotores o puedo usar otro tipo de motores si se puede kuales serian???
No es necesario que sean servos,pueden ser motores dc con su reductora que trabajen +-5v y no consuman mucho.
Un saludo
hay q realizar alguna programacion para el control de los servos??
o solo modificarlosy usar las pilas??