
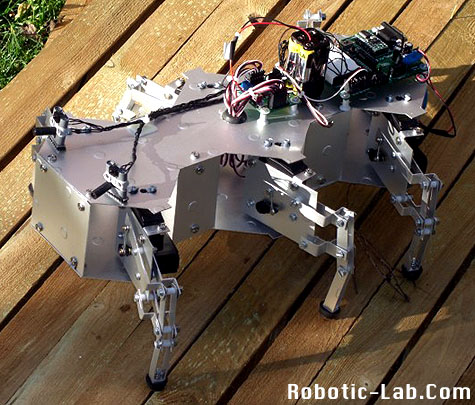
Hola de nuevo, os presento otro de mis robots caseros, el RH-1, el robot es del tipo hexápodo, para su locomoción utiliza 6 patas, con dos servos Futaba en cada una de ellas, el método de avanze que utiliza es el tripode, cuando tres patas están levantadas, las otras tres están en el suelo.
La electrónica de control es una BS2 de Parallax, junto con la controladora de servos. El lenguaje utilizado es el Pbasic.
El vídeo: