En este capítulo veremos el anclaje del resto del sistema tractor: Motores y engranajes.
Para hacer el anclaje utilizaremos otro de los trozos de madera de que disponíamos (capítulo 16).

Para anclar los motores hemos tenido que hacer un par de surcos en la madera, de manera que el motor encaje parcialmente en ella y así no se mueva.

pero además utilizaremos un trozo de cinta de nilon de embalar, sacada del material de embalaje de una caja de juguetes, para terminar de anclar el motor.

Sobre la madera también irán los engranaje-polea “D” (ver capítulo 27), que colocaremos con un eje formado por una de las barillas metálicas del paraguas, cubierta por goma de la funda de los cables, que hará que los engranaje-polea puedan girar, sin desplazarse de su posición lateralmente. Las varillas se cortaron a la longitud deseada doblando en un punto concreto de un lado a otro hasta partirse. Luego se limaron los extremos con la superficie de la piedra, que ha resultado ser muy apta como lima fina. Finalmente utilizaremos una de las abrazaderas para anclar el eje a la madera.

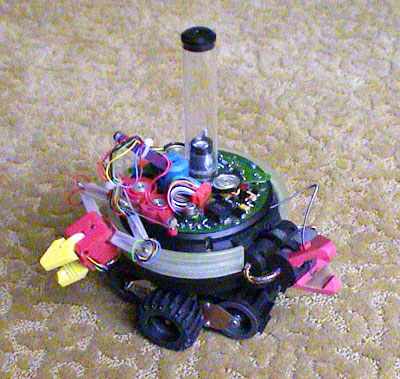
Una vez montado todo el conjunto sobre la madera, con las gomas instaladas, quedaría tal como se ve en la foto siguiente:

Instalando todo este conjunto en el robot, visto por la parte inferior de este, quedaría finalmente como se muestra a continuación:

 El 8 de diciembre se celebra en el Instituto Fraunhofer de ingeniería de producción y automatización (IPA) de Stuttgart (Alemania) un foro tecnológico sobre el uso de robots de servicio en las tareas de vigilancia, constatación y reconocimiento de los peligros.
El 8 de diciembre se celebra en el Instituto Fraunhofer de ingeniería de producción y automatización (IPA) de Stuttgart (Alemania) un foro tecnológico sobre el uso de robots de servicio en las tareas de vigilancia, constatación y reconocimiento de los peligros.