Theo Jansen’s es un escultor y artista Holandés que construye enormes esculturas con cañas de plástico y que posteriormente se mueven por la fuerza del viento, seguro que lo recordaréis del anuncio de BMW emitido en TV.
Pues bien, esta técnica de movimiento se llama Kinética, consiste en lograr un movimiento fluido y suave gracias a la mecánica, de esa increible forma podemos mover un número ilimitado de patas moviendo un solo eje, ya sea con un motor o la fuerza del viento.
A continuación un video donde se puede apreciar como se consigue el movimiento:
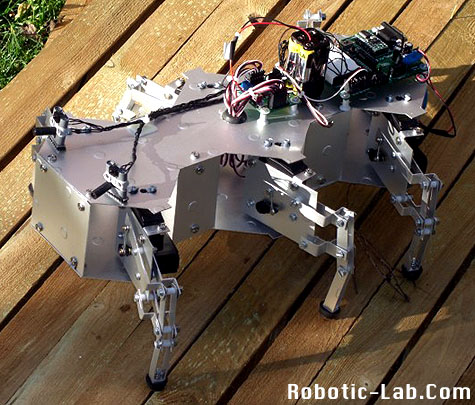
Esta ingeniosa mecánica se puede aplicar a la robótica y crear así peculiares formas de desplazamiento en nuestros robots, por ejemplo el robot de este video:
También pueden hacerse robots de Lego usando esta técnica (video aquí).
Como ven las posibilidades son infinitas, el diseño ya lo tenemos, ahora solo hay que aplicarlo a nuestros proyectos!
Si te animas a hacer algún robot usando esta técnica de movimiento (u otra), no dudes en publicar tus avances en nuestro foro de robótica!