
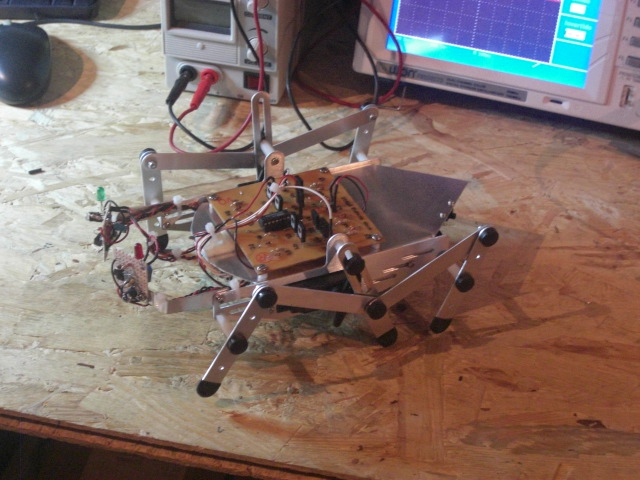
Este robot nació de la idea de armar un robot hexápodo sencillo tanto a nivel de inteligencia y mecánico.La electrónica es de bajo nivel,con esto quiero decir que no utiliza ningún tipo de microcontrolador para definir su comportamiento,si no mas bien componentes discretos y algún c.i.La mecánica de las patas es un kit de Parallax (Crawler Kit) que se acopla al Boe-Bot,el cuerpo es de cosecha propia.Para mover las patas utiliza dos servos Futaba trucados.
Vamos a analizar con mas detalle las partes del robot.
Sensores
Los sensores están dispuestos al frente y su misión es detectar los obstáculos,hay dos, uno direccionado a la izquierda y el otro a la derecha.Se basa en el dispositivo SHARP IS471f.El sensor incorpora un modulador/demodulador integrado y a través de su patilla 4 controla un diodo LED de infrarrojos externo,modulando la señal que este emitirá y luego es captado por el IS471F donde hay el receptor.
Patillaje del sensor y esquema eléctrico.

(Pinchar para ampliar)
Patilla 3=Negativo
Patilla 4=En esta patilla se conecta el diodoIR Led con su resistencia limitadora.La distancia de detección depende de esta resistencia,a mayor resistencia menos corriente circula por el diodo y menor sera la distancia de detección.En cambio si añadimos una resistencia pequeña la corriente aumenta y con ello la distancia de detección,yo he probado con una resistencia de 220 óhmicos y funciona sin problema.
Puente en H

(Pinchar para ampliar)
Multivibrador astable
Hay varias formar de implementar este circuito,yo he utilizado transistores BJT.
Aquí dejo el esquema.

Aquí el video del bicho en acción!!