Acabo de recibir una copia del libro “Bioinspiration and Robotics: Walking and Climbing Robots” donde hemos escrito el capítulo 24 sobre los principios de locomoción de los robots modulares con topologías de 1 dimensión. Es decir, cómo hacer para mover robots de tipo gusano 
El capítulo completo se puede obtener de aquí:
”Locomotion Principles of 1D Topology Pitch and Pitch-Yaw-Connecting Modular Robots”
Además del PDF, están las fuentes en formato OpenDocument (ODF, ISO/IEC 26300) (se puede editar en cualquier plataforma usando por ejemplo el OpenOffice) y todos los dibujos en formato vectorial SVG.
El libro completo estará disponible en la web de los editores para su descarga en unos meses. De hecho, cuando nos propusieron escribir el capítulo, esta fue la razón principal para publicarlo con ellos. Yo personalmente creo que los resultados de las investigaciones tienen que ser accesibles para cualquier persona, sea investigador o no.
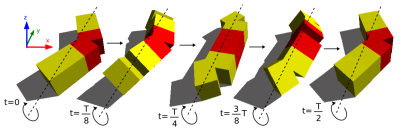
En este capítulo he resumido parte de los resultados de mis investigaciones sobre los algoritmos de locomoción de robots gusanos y es un esbozo de lo que será mi tesis, que ahora mismo estoy escribiendo La parte que más me gusta es la locomoción de las configuraciones mínimas. Me resulta fascinante que con sólo tres simples módulos se puedan conseguir al menos 5 tipos de movimientos diferentes. Uno de ellos es hacer que el robot ruede:
Obijuan

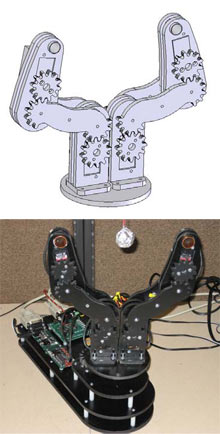
 Este howto te enseña a hacer arañas robot siguiendo la filosofía BEAM, liderada por Mark Tilden. BEAM son las siglas de Biology, Electronics, Aesthetics and Mechanics, es decir, Biología, Electrónica, Estética y Mecánica, y se distingue por la tendencia a crear robots simples, muchas veces similares a insectos, con comportamientos muy básicos, y normalmente alimentados por energía solar. La mantis robotosa y crank también son ejemplos de esta filosofía (aunque todavía no tienen placas solares).
Este howto te enseña a hacer arañas robot siguiendo la filosofía BEAM, liderada por Mark Tilden. BEAM son las siglas de Biology, Electronics, Aesthetics and Mechanics, es decir, Biología, Electrónica, Estética y Mecánica, y se distingue por la tendencia a crear robots simples, muchas veces similares a insectos, con comportamientos muy básicos, y normalmente alimentados por energía solar. La mantis robotosa y crank también son ejemplos de esta filosofía (aunque todavía no tienen placas solares).