
En este capítulo hablaremos de las ruedas y su anclaje.
Como se vió en el anterior, las ruedas se sacarán de los rodillos de tracción de papel de una impresora de inyección de tinta. Son ruedas muy adecuadas y tienen una goma que se agarra muy bien. En su interior encajamos los engranajes “E” que vimos en el capítulo anterior. Estos engranajes salieron de un walkman viejo (ver capítulo 18). Son justo los que mueven las bobinas de cinta de cassette.

La rueda tiene una circunferencia exterior de 164 mm. Eso significa que por cada giro del engranaje “E” el robot avanzará 164mm. En el capítulo anterior vimos que la velocidad de rotación de este engranaje, con los motores sin carga, es de 391,5 y 406rpm, por tanto la velocidad del robot con los motores sin carga sería:
Vrobot=CircunferenciaRueda x Vrotación =
(391,5 y 406rpm) x 164 =
64.206 y 66.584mmpm= 107 y 111cm/sg
Esto es velocidad sin carga, pero la realidad es que los motores soportan la carga de mover los engranajes y el robot, por lo que al ser motores de bajo par, es de esperar que la velocidad con carga se reduzca posiblemente a la mitad o menos, es decir, a unos 50 o 60cm/sg. No es una mala velocidad para un robot de este tamaño, aunque sería incluso mejor que fuese un poco más lento.
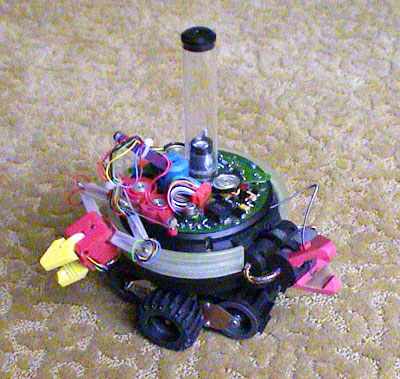
Ahora anclaremos las ruedas a la estructura. Para ello utilizaremos los alambres gruesos de cobre que sacamos de las bengalas en el capítulo 16 y los doblaremos adecuadamente utilizando los ángulos de la piedra.

Obteniendo esta estructura:

Para anclar esta estructura a la parte inferior del robot, utilizaremos las abrazaderas que sacamos del paraguas y que hemos utilizado en otros capítulos:

Quedando finalmente anclado de la siguiente forma:

Las ruedas no se salen de su eje, porque hemos puesto unos pequeños canutillos en los extremos. Estos canutillos son la goma que cubre los cables eléctricos. Esto sirve de tope, ajustándose por presión.
continuara…











 Uno más, se siguen pero no se parecen. Este robot tiene el aspecto de un coche de juguete pero no se lo digáis sino podría molestarse por ello. Su misión: vigilar e imponer la seguridad en sitios públicos como las estaciones, aeropuertos o los grandes almacenes; una especie de chivato en suma.
Uno más, se siguen pero no se parecen. Este robot tiene el aspecto de un coche de juguete pero no se lo digáis sino podría molestarse por ello. Su misión: vigilar e imponer la seguridad en sitios públicos como las estaciones, aeropuertos o los grandes almacenes; una especie de chivato en suma.