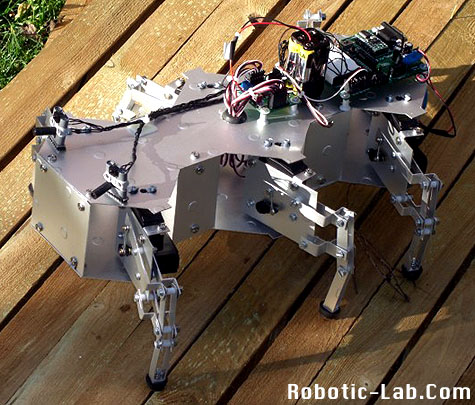
Uno de los medios más habituales de locomoción terrestre en la naturaleza es mediante patas, bípedos, cuadrúpedos, hexápodos, octópodos,… así hasta insectos con muchísimas patas como los ciempiés y milpiés.
Especialmente complicado es el movimiento de los bípedos, que requiere una secuencia continua de pérdida y recuperación del equilibro. No nos es fácil reproducir esa forma de desplazamiento, de ahí que la mayoría de los vehículos terrestres creados por el ser humano se desplacen mediante ruedas.
Los hexápodos es una de las formas más fácil de reproducir, ya que al disponer de seis patas se pueden crear dos grupos de tres patas, manteniendo siempre uno de ellos en posición estable (tres puntos definen un plano) mientras desplazamos el otro grupo a la siguiente posición. Ésta es la combinación más sencilla, llamada «trípode», aunque existen otras dos, la «ola» y la «ondulación». Más información, aunque en inglés, aquí y aquí
Veamos un par de ejemplos:
Para conseguir ejecutar la secuencia de movimientos hay dos formas muy habituales:
– Tener calculada la posición a la que ha de ir cada uno de los servomotores
– Calcular la posición de destino para cada servomotor
La primera es mucho más sencilla pero menos flexible, es la que utilizan los dos robots de los videos anteriores.
En la segunda forma se han de realizar unos cálculos un tanto complejos. Kåre Halvorsen (alias Zenta) es un señor noruego muy simpático (podéis comprobarlo en los foros) que se ha currado un brillante proyecto con excel con el que consigue resultados tan espectaculares como éste:
Y diseñado unas piezas tan elegantes como éstas (aquí adaptadas para los servos AX12+ por evilmachina):

Para saber un poco más de los cálculos aquí tenéis un interesante enlace sobre inverse kinematics
Aunque el maestro moviendo hexápodos es Matt Denton
Ved el siguiente vídeo si lo dudáis 😉