
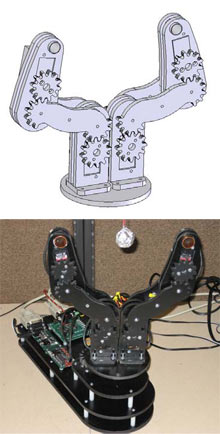
La robótica es una de los grandes campos a estudiar de muchas compañías ansiosas por encontrar nuevos caminos tecnológicos. El equipo de investigadores de Intel es uno de los muchos grupos que se encuentran abocados al desarrollo de robots. Y parece que no les va nada mal en el tema, basta ver este brazo robótico que siente los objetos aún antes de haberlos tocado.
El sistema utiliza una tecnología llamada “Pre Touch”, basara en sensores con electrodos que escanean y recogen la información referente a diferentes objetos. Así, por ejemplo basta que el brazo escanee tres botellas –dos de ellas vacía y una llena- para descubrir cual contiene líquido. Una vez establecido el dato, el brazo se apresurará a escogerla. . Los investigadores también han incorporado los sensores en los dedos de una mano robótica para que estos se ajusten al tamaño y forma de los objetos.
Este nuevo sistema podría mejorar mucho el funcionamiento de distintas fábricas pues si bien hasta ahora ellas se valen de los clásicos robots de siempre para tomar y sostener objetos, la introducción de la tecnología “Pre Tocuh” permitiría que los robots además reaccionaran de manera diferente de acuerdo a las cualidades de cada objeto
Vía: Technology review


{kind=link}