
Este tutorial pretende ser una guía fácil y amena, para la realización de un sencillo robot rastreador de líneas (no microcontrolado).
Personalmente creo que para los que empiezan desde cero, es mejor armar un robot sencillo y que no utilice microcontroladores, si no, circuitos que contengan componentes discretos, y de paso aprenden algo de electrónica básica, lo mismo digo para la parte mecánica. Bueno, vamos al grano!!!
Componentes necesarios para el chasis y mecánica:
- Chapa de Aluminio o Madera de 40x40cm. – 1 Unidad.
- Tacos del 6 largos – 5 Unidades.
- Rueda Loca- 1 Unidad.
- Servos de Rotación Continua (o modificados) – 2 Unidades.
- Ruedas (de unos 5cm de diámetro) – 2 Unidades.
- Tornillos de 3x30mm con arandelas y tuercas – 8 Unidades
- Tornillos de 4x10mm con tuercas – 12 Unidades.
- Tornillos de 4x15mm con tuercas – 4 Unidades.
- Vigas de hierro de 5 agujeros – 6 Unidades.
- Tira de Velcro Adhesivo – 1 Unidad.
Componentes necesarios para la electrónica:
- Protoboard – 1 Unidad.
- Resistencias Necesarias:
2 Resistencias R1,R4 680 Ohm.
2 Resistencias R2,R5 10k Ohm.
2 Resistencias R3R6 2k2 Ohm. - Transistores Necesarios:
2 Transistores Q1,Q4 BD140.
2 Transistores Q2,Q5 BC557.
2 Transistores Q3,Q6 BC547. - Otros Componentes:
J1 Regleta 2 Terminales – 1 Unidad.
J2,J3 Regleta 2 Terminales – 2 Unidades.
OPT1,OPT2 CNY70 – 2 Unidades. - Portapilas de 4 pilas AA – 1 Unidad.
Herramientas necesarias:
- Taladrador.
- Sierra de Calar.
- Cutter.
- Pistola de pegamento térmico.
- Brocas nº6 y nº3
Paso 1 (El Chasis):
Empezaremos por la estructura, yo he utilizado aluminio, pero si queréis, también podéis utilizar madera, he realizado una plantilla con el diseño que yo he usado, podéis crear el vuestro o usar este.
Vista de la estructura, ya cortada y con los agujeros realizados:

Para cortar el aluminio yo utilizo una sierra de calar con una hoja para cortar Hierro.
Paso 2 (La Electrónica):
Bueno, una vez tenemos la estructura hecha, el siguiente paso será cortar la protoboard con las siguientes medidas 6,5 cm ancho por 4,5 cm para ello podemos usar un cutter, así debe quedar:

Para hacer los agujeros en la placa de topos, que nos servirán para sujetar la placa en la estructura, utilizaremos el taladro con una broca del nº3, una vez tenemos los agujeros hechos en la placa, tenemos que hacer otros en la estructura que coincidan con los de la placa.
A continuación, procederemos a insertar los componentes, fijaros bien en el siguiente esquema, ayuda mucho:

Hay que hacer dos circuitos iguales, montados en la placa de topos, cada uno actúa en un motor, cuidado con la polarización de los transistores, las resistencias no necesitan polarización, soldad las regletas, para soldar los componentes, podéis utilizar trocitos de cable o estaño, ojo, con mucha paciencia para no cruzar ninguna pista.
El CNY70 tiene cuatro pines de conexión. Dos de ellos se corresponden con el ánado y cátodo del emisor, y las otras dos se corresponde con el colector y el emisor del receptor. Es importante fijarse bien en el lateral donde aparece el nombre del sensor, para identificar correctamente cada uno de los pines, a continuación podéis ver un pequeño esquema:

Conectamos los CNY70 en la placa de topos, todo tiene que quedar como se ve en las siguientes imágenes:
Parte inferior:
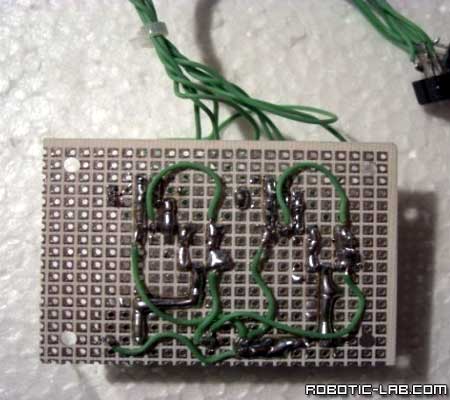
Parte superior:

Montaje:
Ahora sujetaremos la placa sobre la estructura, para separar la placa de la estructura, fabricaremos unos separadores con los tacos del nº6, tenemos que hacer cuatro de una longitud de 2 cm, y 4 tornillos de 3x30mm con sus arandelas y tuercas, para sujetarlo todo, ver fotos a continuación:


Bueno, llegado a este punto, procederemos a montar los servos y la rueda loca, lo primero que tenemos que hacer es trucar los servos, dentro del servo hay un motor de DC, la caja reductora y la electrónica de control, solo tenemos que eliminar la electrónica de control y dejar el motor y la reductora, en este tutorial no voy a explicar cómo hacerlo, para no complicar el tema, en internet existen sitios donde explican cómo hacerlo. Una vez tengamos los servos trucados, procederemos amontar las ruedas en los ejes del los servos y poner las escuadras.
Para hacer las escuadras, necesitamos cuatro vigas de hierro de cinco agujeros, son piezas que se pueden encontrar en kits de meccano, para hacer el ángulo, nos ayudamos con unos alicates, ver fotos:


Hay que hacer cuatro iguales.
Para montar las ruedas, utilizaremos cuatro tornillo de 3×30 mm con sus tuercas, y los discos de plástico que van con los servos, ver fotos.
En las fotos se puede apreciar como he montado la rueda en el eje del motor.


En esta foto se puede apreciar los dos motores con las escuadras y las ruedas montadas.

En la siguiente foto los motores ya están sujetos a la estructura:

Para hacer los agujeros hay que utilizar una broca del nº6, y para sujetarlo todo con tornillos de 4x5mm.
Para el montaje de la rueda loca necesitamos cuatros tornillos 4x15mm con sus hembras, la rueda loca y cuatro separadores, en la foto de abajo, se puede apreciar la rueda montada en la estructura, la longitud de los separadores es de más o menos 1 cm, para hacer los agujeros utilizaremos una broca de nº6.

Bueno, ahora nos faltará fijar los sensores CNY70 en el frontal del robot, los sensores tiene que estar a pocos milímetros del suelo, yo he utilizado dos vigas de hierro juntas, ver foto, todo lo he pegado con silicona, pero cada uno puede hacerlo a su manera.

Ahora nos falta pegar el portapilas en la estructura, nos ayudaremos con tiras de belcro, ver foto.

Ya solo nos falta hacer la conexión de alimentación, y conectar los motores en el circuito, fijaros bien en la foto, la regleta del medio es la alimentación, ojo con la polaridad, los motores hay que cruzarlos, en la regleta izquierda hay que conectar el motor derecho y viceversa, fijaros en la polarización de los motores.

Bueno, si habéis seguido todos los pasos, el aspecto final del robot es el que se ve en la foto de abajo, los ojos son opcionales.
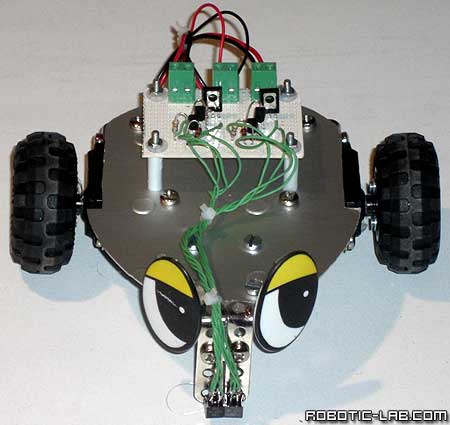
Ahora solo falta probarlo!!!
He intentado en hacer un tutorial fácil y ameno, espero que la gente se anime en realizarlo, porque la única forma de aprender es haciendo las cosas y cometiendo errores…
Saludos!
Ismael Serra Garrote
Circuito impreso por X-Robotics.
Es posible que los transistores no trabajen en su zona de corte cuando los sensores detecten linea blanca y los motores reciven tensión.
¿Has cambiado los valores de alguna resistencia? ¿los transistores son los mismo que hay en el esquema?
Pásame el esuqema eléctrico con los componentes que has utilizado,haber si puedo ayudarte.
Un saludo
hola tengo otra pregunta 😀 2k2 suena raro es lo mismo q 2,2 k ohm ?
Es una resistencia de 2200 ohmios,´código rojo,rojo,rojo.
¿No habras puesto una resistencia de 220 ohmios?? eso explicaría el mal funcionamiento,tiene que ser de 2200 ohmios.
Un saludo
no xD, tengo una pregunta ahora q e terminado el robot, al conectar las pilas los motores giran pero cny70 no se encienden e intentado cmbiarlos de posicion pero sique igual 🙁
Hola Ismael, muy buen post.
Este verano me gustaria dedicarme a hacer este robot y ya he empezado, pero tengo una duda, me gustaria que me dijieras como diferencio el emisor y el colector de los transistores sin utilizar el voltimetro??
Donde puedo encontrar un CNY70 es el ultimo material que me falta para esto i en mi tienda no lo tenian.
¡Gracias!
Busca el datasheet la referencia del transistor,en donde te indicara cual es la base,emisor y colector del transistor.
Referente al cny70 busca en alguna tienda en internet,es un sensor muy común.
Un saludo
Alguien sabe q puede ser?
Me encantaria hacerlo. Se necesitan muchos conocimientos de electronica y mecanica para hacerlo?
no hay nadie en este foro que pueda decirme cual es el problema?
¿Qué problema tienes???
e hecho mi robot el problema es que los motores giran sin parar el cny70 no se enciende e probado a cammbiarlo de posicion y nada, el robot lo e hecho en una placa de aqui http://www.x-robotics.com/downloads/Pcbs/x-easysniffer.pdf
Vamos hscer una cosa,si quieres que te ayude necesito que montes en una protoboard el circuito tal cual lo has armado en la placa,haces una foto y me la mandas por e-mail [email protected],haber si puedo ver donde esta el fallo.
Un saludo
ok muchas gracias intentare hacerlo para la semana que viene 🙂
estas cañon amigo
lo haré, cuando tenga los materiales jajajajajajejejeje.
Muy bueno, me superas en robótica pero por poco.
hola Ismael, e terminado de montar la placa, xo no se como es su funcionamiento, xk tapo uno de los dos cny70 y a mi entender tendria k disminuir la velocidad de uno de los motores o pararse verdad? xk no hace nada, los motores siguen a la misma velocidad.. no se xk debe ser…
tambien me gustaria k alguien me aclarara el funcionamiento del cny70, como puedo saber si funciona?
Hola Ismael, tengo hecho ya el robot pero me gustaría sabe si podría utilizar un motor de DC y no un servomotor, o tiene que ser un servomotor obligatoria mente
Gracias
P. D. Teng otro problema, los motores me giran si parar, no influye si el CNY70 detecta una linea o no, me estoy volviendo loco, no se si son los transistores o si he conectado mal el cny70, AYUDAA
me gustaria que subieras un video de como fuiste armando tu circuito paso a paso eso seria de utilidad espero que lo hagas me seria de mucha utilidad espero sea antes de terminar esta semana
la verdad pienso que es un proyecto bastante interesante lo voy a intentar……………………..
Hola he armado el circuito pero parece no funcionar, es decir funciona directo, se hacen dos circuitos como en la imagen y luego del porta pilas tengo que sacar las dos lineas para cada circuito?
Gracias!
Hola, ¿Hay alguna forma de hacer que el robot siga una línea blanca en vez de una negra? Gracias.
pero que referencia son los motores o que .-….
en el diagram no dicen el nombre
que referencias son los motore que en el diaGRAMA NO DICE
El protoboard tiene que ser de esa clase o puede ser de cualquiera.Trabajo que desia que priro se empiesa desde lo fasil
porfavor rrespondan
hola quisiera saber q color de linea sigue. gracias
La linea es negra,pero tambien puede seguir una de blanca haciendo algunas modificaciones.
Tengo un problema, estoy haciendo el seguidor de linea con un pic18f4550 y uso tip 122 para aumentar la corriente,poniendolos en corte y saturacion (como un switch), y funciona con leds, pero cuando conecto unos motoreductores que tengo se cae la señal del circuito,ya probe con diodos y sirven los motores..una ayuda xa aislar el sistema de control de la parte de potencia..
podrias explicar como hacer esas modificaciones si es que no tienes problemas gracias.
porfavor porque tengo que viajar a bahia blanca en octubre y necesito hacer un circuito. gracias
hola,
mi pregunta es sobre el cny70,
resulta que lo e buscado en las elecronicas pero me preguntan que es exactamente XD
por fabor puedes poner el nombre de este artefacto??
yo tengo ya todas las piesas pero me falta esta
El CNY70 es un sensor óptico reflexivo que tiene una construcción compacta donde el emisor de luz y el receptor se colocan en la misma dirección para detectar la presencia de un objeto utilizando la reflexión del infrarrojo sobre el objeto. Es uno de los sensores que más se suele usarse para los robots seguidores de línea.
Hola
El diagrama esta bastante claro, muchas gracias. Solo que no entiendo en donde se conecta J3 y como se conecta eso a los motores. Alguien podria explicarme? Gracias
Los motores se conectan del colector del transistor bd140 y tierra.J3 es una regleta de conexión,puedes prescindir de ellas,hay tres dobles,una para alimentación,y las otras dos para conectar los motores.Como te he dicho,los motores y la alimentación puedes soldar directamente al circuito.
Un saludo y suerte!!!
muchas gracias n.n
de que depende la velocidad del carrito? y que puedo hacer si quiero que presentas vaya mas rapido?
hola que tal? bueno tengo una pequeña duda J1 y J2 (alimentacion motor) una patita va conectada a la resistencia de 2.2 y de ahi sigue su camino y la otra patita se conecta a la base del BD140 si estoy mal corrijanme… bueno hasta ahi lo entiendo ahora mi pregunta es el J3 (regleta de alimentacion electrica) como la conecto? o a donde tiene que ir conectada? ahi si me pierdo!!!
Hola,
Puedes prescindir de la regleta j3,la conexión la puedes hacer directa,el (+) se conecta a los emisores de bc557 y bd140 junto con colector y ánado del cny70(ver esquema).Y el (-) a las resistencias r1,r2,r3 y emisor de bc547.
Un saludo
excelente ya les informare mas noticias mañana lo termino xq me falta conseguir los motores hasta mientras una ultima pregunta de que depende la velocidad del robot? podre hacer que vaya mas rapido? no se se me ocurre incrementarle el voltaje levemente a los motores que opinan? recuerden que soy usuario promedio no soy un genio en electronica
hola buen vídeo el mejor explicado felicitaciones mi pregunta es puedo remplazar los sensores cny70 o el qrb34 por dos foto-transistores y un led infrarrojo como los utilizados en los controles pues no e podido encontrar los sensores quiero que el sensor quede como el visto aquí http://www.youtube.com/watch?v=gRKm-D79wWg porque estos dicen que enseñan pero no dicen como conectarlo les agradecerían que lo vea y me informa si se puede adaptar a tu circuito y como hacerlo te lo agradecería eternamente espero tu pronta respuesta
mi correo es [email protected]
Gracias por el aporte, realmente lo que me sirvió fue el diagrama del circuito, tenía duda al principio pues había probado el sensor y funcionaba pero con las resistencias al positivo, pero al conectar el motor me botaba todo,en el diagrama aparecen en el negativo, y realmente funcionó hasta tener todo armado. yo utilicé un sensor QRD1114
Lo de aumentar el voltaje no es una buena idea,ya que podría dañar algun componente.Un solución sería modificar la reductora haciendo aumentar la velocidad pero sacrificando el par(fuerza).En el mercado venden motores con engranajes varios,asin puedes hacer combinaciones para obtener la relación deseada.
Un saludo y suerte!!
hola, empezare a hacer este sigue lineas pero el problema esque no encuentro los servos así que sustituiré el engranaje e instalare solo dos motores y quería saber si para reducir su velocidad debo de aumentar el valor de la R3 también quiero instalare un LED antes del motor y quería saber si con la R3 es suficiente como protección o deveria de ponerle una R de 330 ohms.
por ultimo quiero instalar la alimentación con una batería de 9v y reducir su voltaje a 5v con un 7805 para reducir el peso crees que afecte su funcionamiento?
gracias espero una pronta respuesta.
ismael una consulta yo como no consegui el cny70 en mi pais use un fototransistor y un led ir , al ver un por una camara web el led ir encinede pero el motor no enciende. tambien cambie el transistor bd140 por b649a y el bc557 por un 2n4403.Un dia de estos probando me di cuenta que los motores querian encender al acercar mi dedo al fototransistor y tape todo el transistor y funcionaron los motores pero al dia siguiente al probar de nuevo ya no detectaban nada y no se que ocurre sera que se dañaron los fototransistores??? espero tu respuesta muchas gracias
ismael una consulta yo como no consegui el cny70 en mi pais use un fototransistor y un led ir , al ver un por una camara web el led ir encinede pero el motor no enciende. tambien cambie el transistor bd140 por b649a y el bc557 por un 2n4403.Un dia de estos probando me di cuenta que los motores querian encender al acercar mi dedo al fototransistor y tape todo el transistor y funcionaron los motores pero al dia siguiente al probar de nuevo ya no detectaban nada y no se que ocurre sera que se dañaron los fototransistores??? espero tu respuesta muchas gracias.
q tendria q cambiar si quiero hacer un seguilineas blanca.
Hey bro grax por el tutorías…!
Será mi proyecto de entrega para fin de cursos….!!
Y maso cuanto tiempo tardasta en hacelo?
La resistencia de 10 k es 1/4 o 1/2 ?
Y por cierto en vez de 2k2, valdría dde 2 k?