
Este tutorial pretende ser una guía fácil y amena, para la realización de un sencillo robot rastreador de líneas (no microcontrolado).
Personalmente creo que para los que empiezan desde cero, es mejor armar un robot sencillo y que no utilice microcontroladores, si no, circuitos que contengan componentes discretos, y de paso aprenden algo de electrónica básica, lo mismo digo para la parte mecánica. Bueno, vamos al grano!!!
Componentes necesarios para el chasis y mecánica:
- Chapa de Aluminio o Madera de 40x40cm. – 1 Unidad.
- Tacos del 6 largos – 5 Unidades.
- Rueda Loca- 1 Unidad.
- Servos de Rotación Continua (o modificados) – 2 Unidades.
- Ruedas (de unos 5cm de diámetro) – 2 Unidades.
- Tornillos de 3x30mm con arandelas y tuercas – 8 Unidades
- Tornillos de 4x10mm con tuercas – 12 Unidades.
- Tornillos de 4x15mm con tuercas – 4 Unidades.
- Vigas de hierro de 5 agujeros – 6 Unidades.
- Tira de Velcro Adhesivo – 1 Unidad.
Componentes necesarios para la electrónica:
- Protoboard – 1 Unidad.
- Resistencias Necesarias:
2 Resistencias R1,R4 680 Ohm.
2 Resistencias R2,R5 10k Ohm.
2 Resistencias R3R6 2k2 Ohm. - Transistores Necesarios:
2 Transistores Q1,Q4 BD140.
2 Transistores Q2,Q5 BC557.
2 Transistores Q3,Q6 BC547. - Otros Componentes:
J1 Regleta 2 Terminales – 1 Unidad.
J2,J3 Regleta 2 Terminales – 2 Unidades.
OPT1,OPT2 CNY70 – 2 Unidades. - Portapilas de 4 pilas AA – 1 Unidad.
Herramientas necesarias:
- Taladrador.
- Sierra de Calar.
- Cutter.
- Pistola de pegamento térmico.
- Brocas nº6 y nº3
Paso 1 (El Chasis):
Empezaremos por la estructura, yo he utilizado aluminio, pero si queréis, también podéis utilizar madera, he realizado una plantilla con el diseño que yo he usado, podéis crear el vuestro o usar este.
Vista de la estructura, ya cortada y con los agujeros realizados:

Para cortar el aluminio yo utilizo una sierra de calar con una hoja para cortar Hierro.
Paso 2 (La Electrónica):
Bueno, una vez tenemos la estructura hecha, el siguiente paso será cortar la protoboard con las siguientes medidas 6,5 cm ancho por 4,5 cm para ello podemos usar un cutter, así debe quedar:

Para hacer los agujeros en la placa de topos, que nos servirán para sujetar la placa en la estructura, utilizaremos el taladro con una broca del nº3, una vez tenemos los agujeros hechos en la placa, tenemos que hacer otros en la estructura que coincidan con los de la placa.
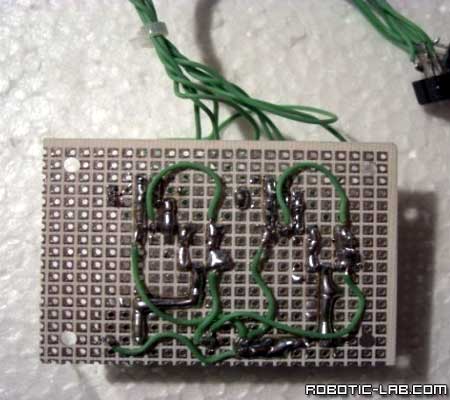
A continuación, procederemos a insertar los componentes, fijaros bien en el siguiente esquema, ayuda mucho:

Hay que hacer dos circuitos iguales, montados en la placa de topos, cada uno actúa en un motor, cuidado con la polarización de los transistores, las resistencias no necesitan polarización, soldad las regletas, para soldar los componentes, podéis utilizar trocitos de cable o estaño, ojo, con mucha paciencia para no cruzar ninguna pista.
El CNY70 tiene cuatro pines de conexión. Dos de ellos se corresponden con el ánado y cátodo del emisor, y las otras dos se corresponde con el colector y el emisor del receptor. Es importante fijarse bien en el lateral donde aparece el nombre del sensor, para identificar correctamente cada uno de los pines, a continuación podéis ver un pequeño esquema:

Conectamos los CNY70 en la placa de topos, todo tiene que quedar como se ve en las siguientes imágenes:
Parte inferior:
Parte superior:

Montaje:
Ahora sujetaremos la placa sobre la estructura, para separar la placa de la estructura, fabricaremos unos separadores con los tacos del nº6, tenemos que hacer cuatro de una longitud de 2 cm, y 4 tornillos de 3x30mm con sus arandelas y tuercas, para sujetarlo todo, ver fotos a continuación:


Bueno, llegado a este punto, procederemos a montar los servos y la rueda loca, lo primero que tenemos que hacer es trucar los servos, dentro del servo hay un motor de DC, la caja reductora y la electrónica de control, solo tenemos que eliminar la electrónica de control y dejar el motor y la reductora, en este tutorial no voy a explicar cómo hacerlo, para no complicar el tema, en internet existen sitios donde explican cómo hacerlo. Una vez tengamos los servos trucados, procederemos amontar las ruedas en los ejes del los servos y poner las escuadras.
Para hacer las escuadras, necesitamos cuatro vigas de hierro de cinco agujeros, son piezas que se pueden encontrar en kits de meccano, para hacer el ángulo, nos ayudamos con unos alicates, ver fotos:


Hay que hacer cuatro iguales.
Para montar las ruedas, utilizaremos cuatro tornillo de 3×30 mm con sus tuercas, y los discos de plástico que van con los servos, ver fotos.
En las fotos se puede apreciar como he montado la rueda en el eje del motor.


En esta foto se puede apreciar los dos motores con las escuadras y las ruedas montadas.

En la siguiente foto los motores ya están sujetos a la estructura:

Para hacer los agujeros hay que utilizar una broca del nº6, y para sujetarlo todo con tornillos de 4x5mm.
Para el montaje de la rueda loca necesitamos cuatros tornillos 4x15mm con sus hembras, la rueda loca y cuatro separadores, en la foto de abajo, se puede apreciar la rueda montada en la estructura, la longitud de los separadores es de más o menos 1 cm, para hacer los agujeros utilizaremos una broca de nº6.

Bueno, ahora nos faltará fijar los sensores CNY70 en el frontal del robot, los sensores tiene que estar a pocos milímetros del suelo, yo he utilizado dos vigas de hierro juntas, ver foto, todo lo he pegado con silicona, pero cada uno puede hacerlo a su manera.

Ahora nos falta pegar el portapilas en la estructura, nos ayudaremos con tiras de belcro, ver foto.

Ya solo nos falta hacer la conexión de alimentación, y conectar los motores en el circuito, fijaros bien en la foto, la regleta del medio es la alimentación, ojo con la polaridad, los motores hay que cruzarlos, en la regleta izquierda hay que conectar el motor derecho y viceversa, fijaros en la polarización de los motores.

Bueno, si habéis seguido todos los pasos, el aspecto final del robot es el que se ve en la foto de abajo, los ojos son opcionales.
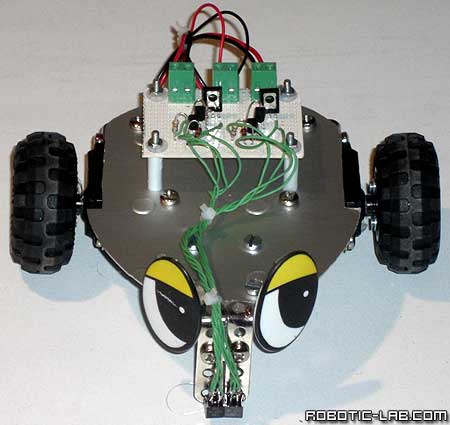
Ahora solo falta probarlo!!!
He intentado en hacer un tutorial fácil y ameno, espero que la gente se anime en realizarlo, porque la única forma de aprender es haciendo las cosas y cometiendo errores…
Saludos!
Ismael Serra Garrote
Circuito impreso por X-Robotics.
porfa ayudennos lo necesitamos
Hola kata,
Tienes dos opciones.Utilizar servos o motores dc con su reductora.
Si utilizas servos tendras que trucarlos.Me explico,en el interior de un servo hay un motor dc con la reductora y la electrónica de control,el trucaje consiste en dejar el motor dc con su reductora y quitar la electrónica.El precio de los servos rondan los 10€ aprox. cada uno,estos los más económicos.
La otra opción es comprar motor dc con su reductora y listo.
Yo te recomiendo los servos.
Un saludo y suerte en el montaje.
hola una pregunta?? kisiera saber si me puede ayudar con un robot sigue lineas pero el chiste de este es utilizar un micro(o mas)AT89C51 es un proyecto ke me dejaron en la escuela… pero no se como realizarlo….kisiera ver un diagrama y un programa para cargarlos en los micros….espero me pueda ayudar graxias
Una preguntota mi queridisimo Ismael, Puedo utilizar motores de CD en lugar de cervos¿¿¿?=????
espero la respuesta besos
ola como estas e puedo prguntar para q sirve un robot
sigue lineas
puedo usar motores normales dc y una duda con las resistencias R3y R6 cual es el valor
mira una pregunta que preci tiene construir el robot
olaaa qiero aser este robot para un trabajo eskolar
ai garantia de ke el sircuito funcione ??
espero respuesta [email protected]
en mexico
ismael una pregunta…..en vez de las pilas puedo utilizar paneles solares
porfa contesta
Mejor utilizar pilas.Con esto no quiero decir que con paneles solares no funcione,pero los paneles tendrian que generar una tensión constante y ademas suministrar sufuciente corriente para accionar los motores.
ya gracias
ismael ia ise el circuito pero no estoi seguro de de como funsiona el cny7o y como se que estan funcionando? ya los konekte pero no asen nada! porfabor te agradesere si me kontestas!
No tengo suficiente información para ayudarte,pueden ser muchas cosas,desde una mala conexión de los cny70 o mala polarización de los transistores.Mandame por correo unas fotos del circuito montado en una protoboard,haber si puedo ver donde esta el fallo.
Un saludo
ia rebise el circuito i tiene un voltaje de entrada y uno de salida. osea ke si funciona
lo ke nesesito saber bien es kual es la polaridad del cny70 y si tienes una imagen para poder ilustrarme en el diagrama esta el simbolo pero no bien identificadas las termianles :
cual es el anodo el catodo el emison y el colector!
[email protected]
hola!! estoy haciendo este circuito para un proyecto de emprendedores pero el voltaje saliente al motor me marca 5V, al momento de ponerlo en la linea negra no pasa nada, sigue igual ya intente con sustitutos pero no me funciona igual que con los originales, intente iluminar el fototransistor (al cual llegan 5v) con una lampara de telefono y si corto la corriente pero no activa el motor, pero al conectar el motor se muere el voltaje
muy buen blog te felicito :).en cuanto al seguidor de lineas me sirvió para un proyecto en mi clase.
vuelvo a felicitarte y gracias por la ayuda que me diste
🙂
De nada!! para mi es un placer
Un saludo
hooooolaaaaaaaaaaaaaaaa
disculpa tambien funciona con motores de corriente continua????
Hola, me parecio bastante bien tu proyecto, tengo una pregunta de que voltaje tienen que ser lo motores?
Hola,
Los motores trabajan con una tensión de 5 voltios.
Un saludo
Hola Ismael, ya arme el circuito pero no sigue las lineas, solo avanza en linearecta no se si hice algo mal (supongo que si), pero lo que no me quedo muy claro es como alimentar a los dos circuitos con la misma fuente de voltaje
Hola,
Pasame el esquema que has seguido para el montaje, y te podré echar una mano,necesito mas información.
Un saludo
tio muchas Gracias!!!
funciona perfecto. Me costó un poco la conexión del CNY70 pero luego todo OK. Si a alguien le pasa lo mismo me ayudo esta imagen : http://at89c52proyect.files.wordpress.com/2010/08/herradura-y-cny70.jpg
Lo dicho muy buen tutorial para iniciarse y Gracias
Enhorabuena Pablo.Si puedes cuelga algun video.
Un saludo
NECESITO HACER UN OBJETO TECNOLOGICO QUE SE MUEVA CON UN CIRCUITO ELECTRICO ?
Yo lo hice exactamente igual ese diagrama lo alimento con 8 volts y el circuito me baja el voltaje y no anda nada alguna sugerencia que checo o que voltajes me debe dar en la salida para el motor ya que midiendo me da como 2 volts y no levanta mis motores «Mis motores son de 6 volts»
oyes los sircuitos J1 regleta 2 terminales-1unidad y el que sigue el J2 y el OPT1, OPT2 y el CNY70 no se que son no los encuentro ni los transitores me puedes enviar una imagen a mi correo en facebook o en hotmail de cada cosa transitores y lo de BD140 mi correo es [email protected]
hola, perdona mi ignorancia, pero ¿como se cual es el positivo y cual es el negativo en el transistor? gracias
¿puedo alimentarlo con 9 volts reemplazando los servos x motores con fuerza?
hola
tengo unas preguntas:
a) ¿puedo alimentarlo con 9 volts reemplazando los servos x motores con fuerza?
b)¿como se cual es el + y el – en los transistores?
desde ya gracias
Existen dos tipos de transistores bjt y segun la disposición de los cristales,estos son NPN y PNP.
Para polarizar correctamente un transistor tienes que tener en cuentas esta reglas básicas:si es npn la base tiene que ser positiva respecto al emisor negativo,esto se conoce como polarización directa de la unión base emisor,y el colector un potencial positivo.Si es un pnp la base negativa con respecto al emisor y el colector negativo.
Referente en aplicar 9v al circuito es posible que funcionara,pero supongo que se tendría que hacer algunas modificaciones,no se,yo no lo he probado.
gracias!!
hola
quiero saber de cuantos watts deben ser las resistencias
Todas de 1/4 W
gracias de nuevo
yo tengo un grann problema con el cny70 y esta todo bien colocado y todo conectado no se lo que falla me podeis ayudar?
les cuento mi experiencia: primero q todo tienen q tener en cuenta la polaridad del BD 140 mirandolo con las letras de frente: Izquierda=emisor, centro=colector, derecha=base.
segundo tengan en cuanta la polaridad del cny70: el anodo va a positivo, el katodo va a la resistencia de 680 y luego a negativo.
el emisor va a la base del BC547 y luego a la resistencia de 10k y luego al negativo.
el coelctor va a positivo.
si quieren saber si el led infrarojo del cny70 esta funcionando lo unico q tienen q hacer es mirar a traves de una camara de un celular el led cuando lo tengan conectado a la corriente, tiene q alumbrar como rosadito
que tal me parecio muy buena tu tutorial pero tengo unas dudas yo lo he intentado hacer ya varias veces pero yolo estoy haciendo en placa pero no mas no me da cuando lo conecto me da q los motores avanzan sin para ni hacer mas no se si son los sensores o que pero no me hace nada mas me podrias dar una ayuda que ya me quiero colgar de un puente xD [email protected]..
Haz el circuito en una protoboard y pasame una foto,asin podre ver donde esta el fallo.Es posible que los cny70 esten mal polarizados.
Un saludo
Hola me parece muy bueno tu proyecto, queria saber cuanto cuesta mas o menos los COMPONENTES ELECTRONICOS que se tienen que utilizar.
gracias de antemano 🙂
Hola,
Los componentes son muy económicos,son fáciles de adquirir en cualquier tienda de electrónica.
Un saludo
¿¿Y el precio aproximado de los componentes electronicos??
Un saludo
cuantos € mas o menos son los componentes electronicos¿?
gracias de ante mano Ismael!! 🙂
hola tengo una pregunta estoy mirando por internet los transistores pero no se cuales elegir por que en unos pone A otros B etc. BC547A BC547B—BC557A BC557B
Son equivalentes.
Un saludo
El coste total del robot incluidos los servos,unos +,- 30€
Un saludo
gracias pero tengo todavia una pregunta, puedo usar un transistor BC547A i otro BC557B en el mismo circuito ?
Hola buenas tardes.. yo estoy haciendo un seguidor de lineas con el diagrama que muchos de aqui ocupan, el problema esque al detectar el sensor linea blanca..los motores solo reducen la velocidad.. no se apagan.. y al detectar linea negra, la velocidad aumenta.. ¿Que podria estar mal? las conexiones del sensor estan bien.. y las de los transistores tambn..
Espero sus respuestas..