
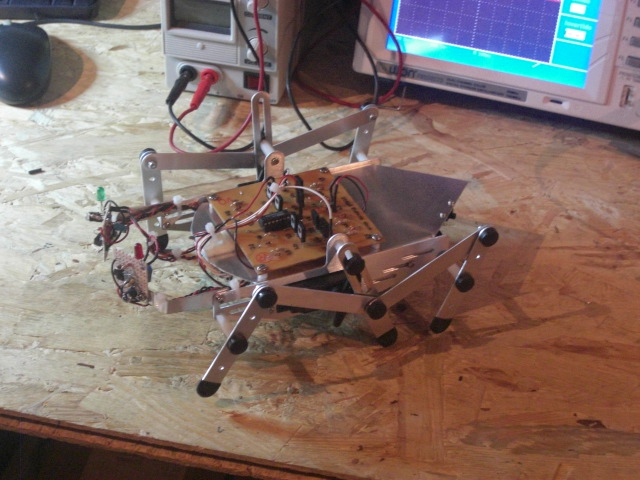
Este robot nació de la idea de armar un robot hexápodo sencillo tanto a nivel de inteligencia y mecánico.La electrónica es de bajo nivel,con esto quiero decir que no utiliza ningún tipo de microcontrolador para definir su comportamiento,si no mas bien componentes discretos y algún c.i.La mecánica de las patas es un kit de Parallax (Crawler Kit) que se acopla al Boe-Bot,el cuerpo es de cosecha propia.Para mover las patas utiliza dos servos Futaba trucados.
Vamos a analizar con mas detalle las partes del robot.
Sensores
Los sensores están dispuestos al frente y su misión es detectar los obstáculos,hay dos, uno direccionado a la izquierda y el otro a la derecha.Se basa en el dispositivo SHARP IS471f.El sensor incorpora un modulador/demodulador integrado y a través de su patilla 4 controla un diodo LED de infrarrojos externo,modulando la señal que este emitirá y luego es captado por el IS471F donde hay el receptor.
Patillaje del sensor y esquema eléctrico.

(Pinchar para ampliar)
Patilla 3=Negativo
Patilla 4=En esta patilla se conecta el diodoIR Led con su resistencia limitadora.La distancia de detección depende de esta resistencia,a mayor resistencia menos corriente circula por el diodo y menor sera la distancia de detección.En cambio si añadimos una resistencia pequeña la corriente aumenta y con ello la distancia de detección,yo he probado con una resistencia de 220 óhmicos y funciona sin problema.
Puente en H

(Pinchar para ampliar)
Multivibrador astable
Hay varias formar de implementar este circuito,yo he utilizado transistores BJT.
Aquí dejo el esquema.

Aquí el video del bicho en acción!!
quiero conoserte
yo hice uno igual pero con material que recicle de mi taller y es radiocontrolado. el radiocontrol tambien es un diseño adaptado por mi. aqui hay un video http://www.youtube.com/watch?v=mlLT8yNs18g y los planos y circuiteria los subi a foros de electronica.
saludosss
che¿que paso con mi comentario???
D@rio en q parte dejaste la circuiteria del robot xq yo lo estoy haciendo con palitos de helado
hola muy bueno el proyecto, quisiera saber cual es el integrado IC1 del puente H, gracias saludos atte
cual es ICI?
porfa me pueden dar pasos para acer un robot
hola, podrias darme las medidas de las patas y el chasis del robot ??